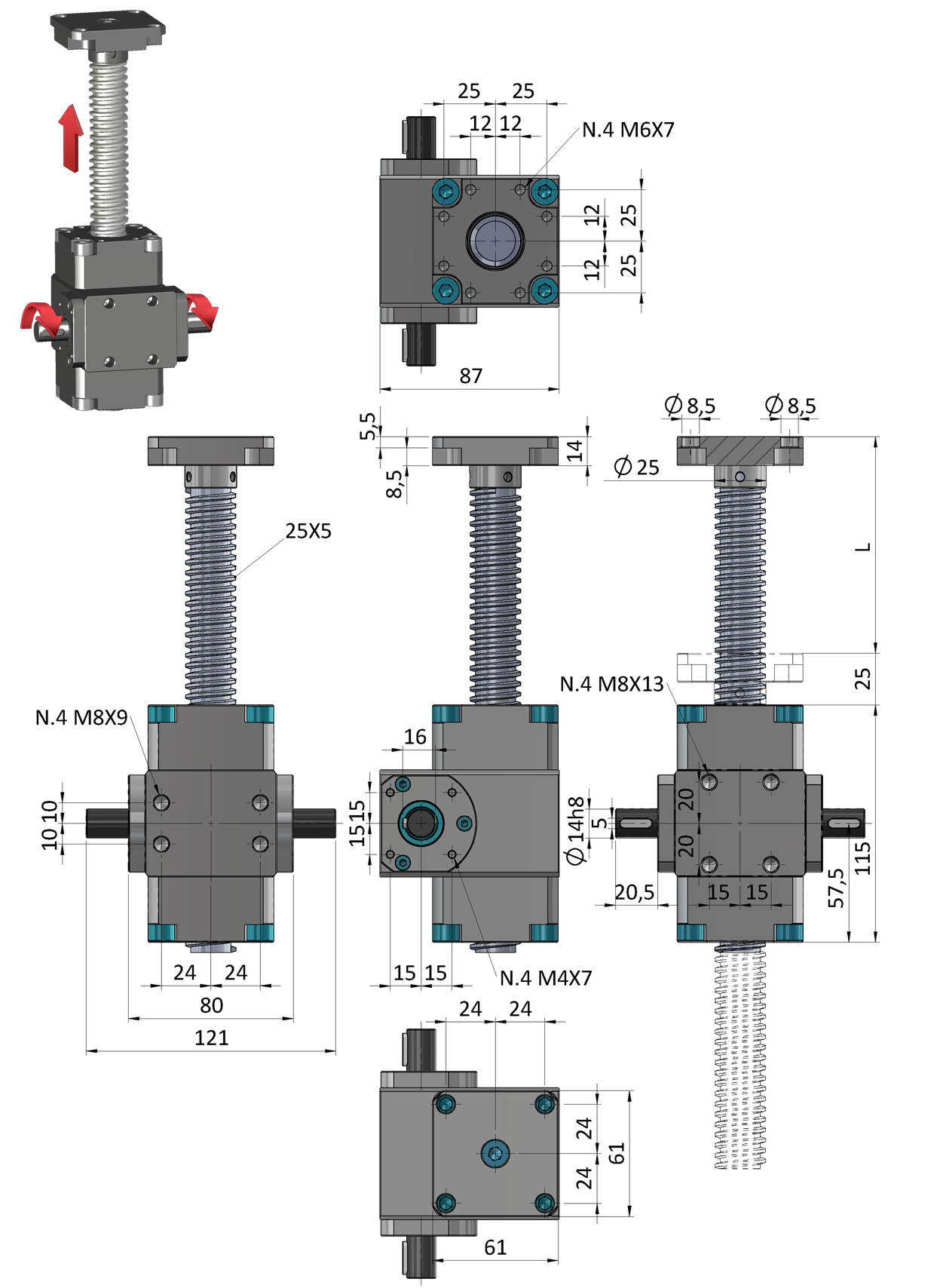
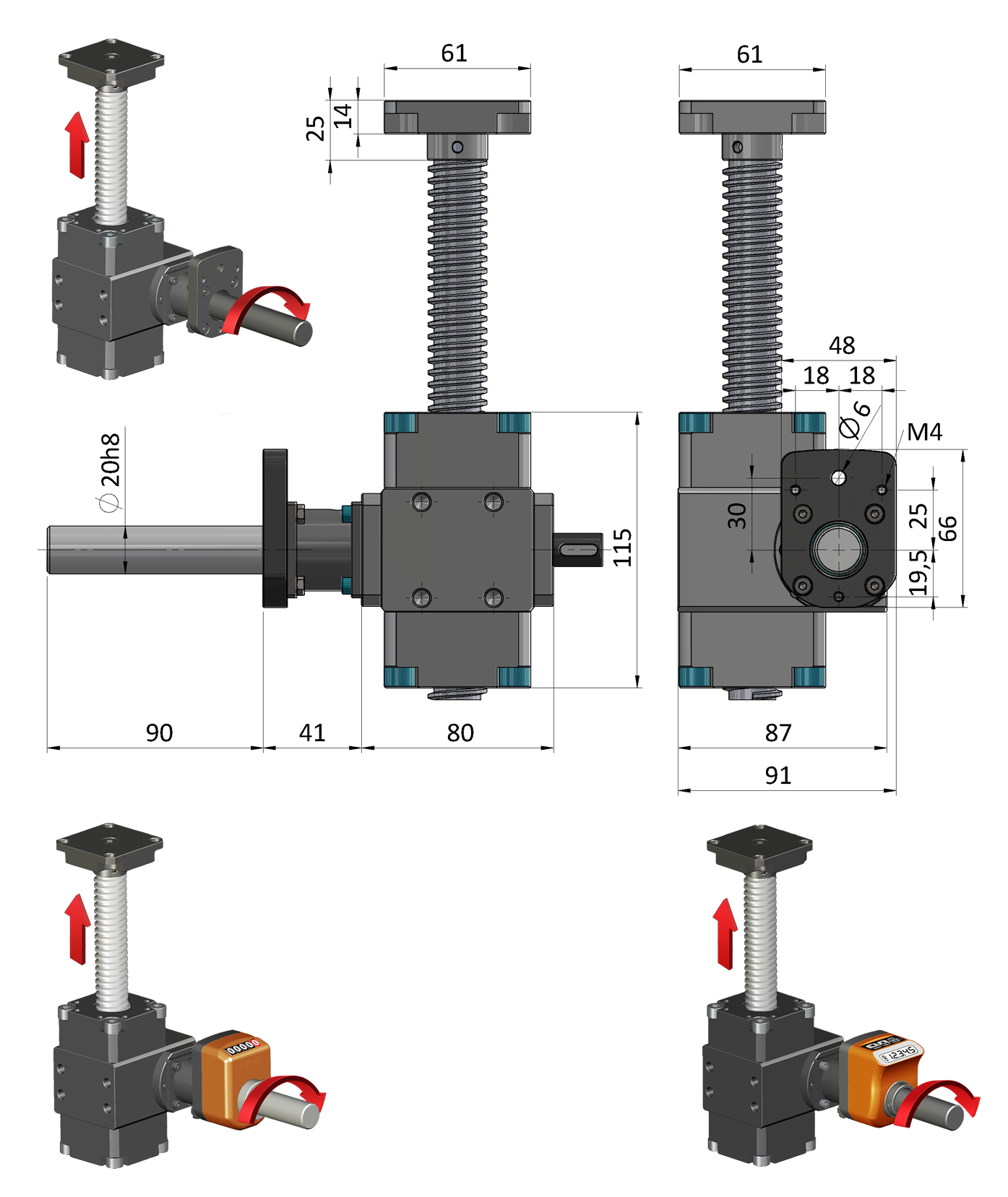
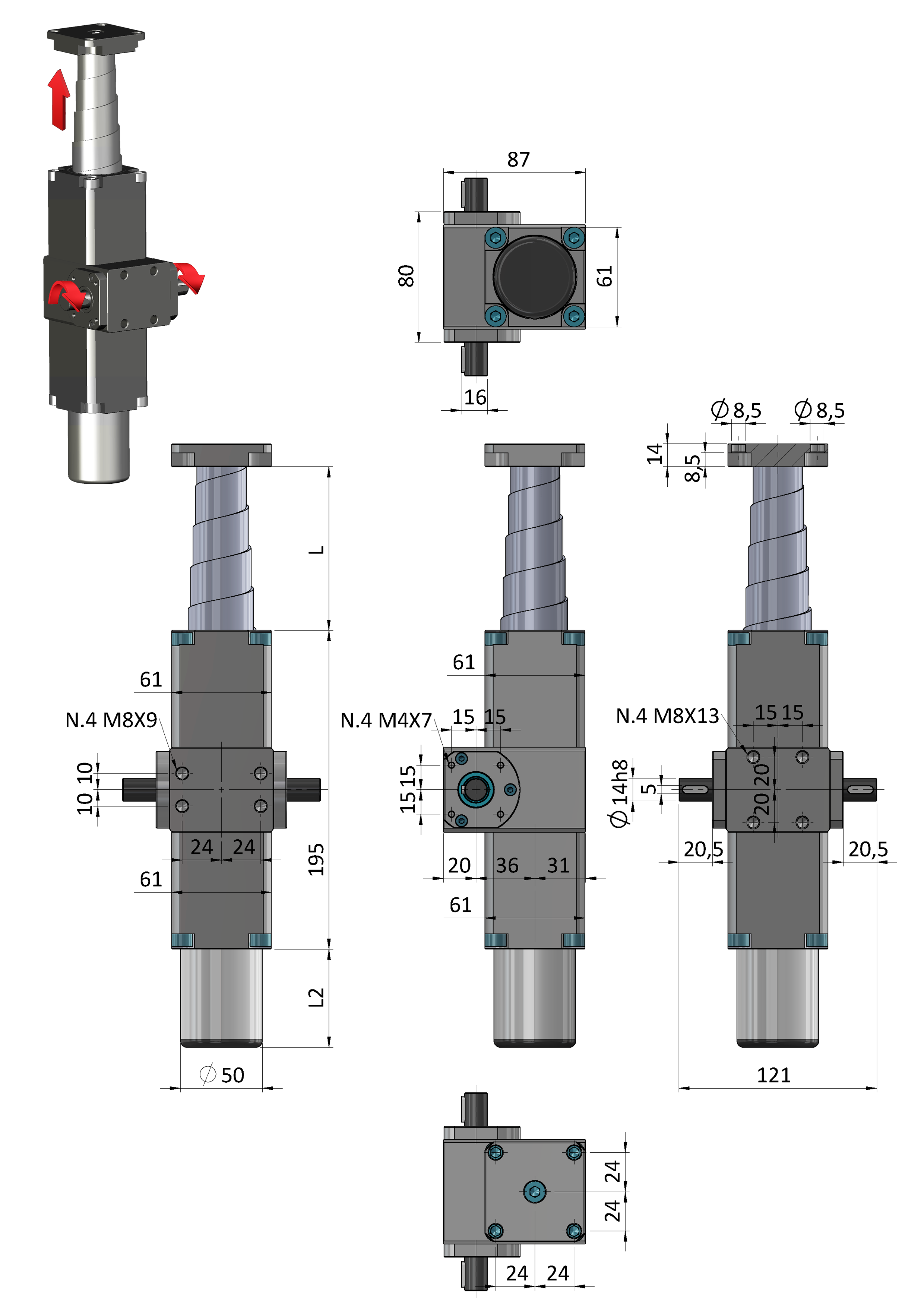
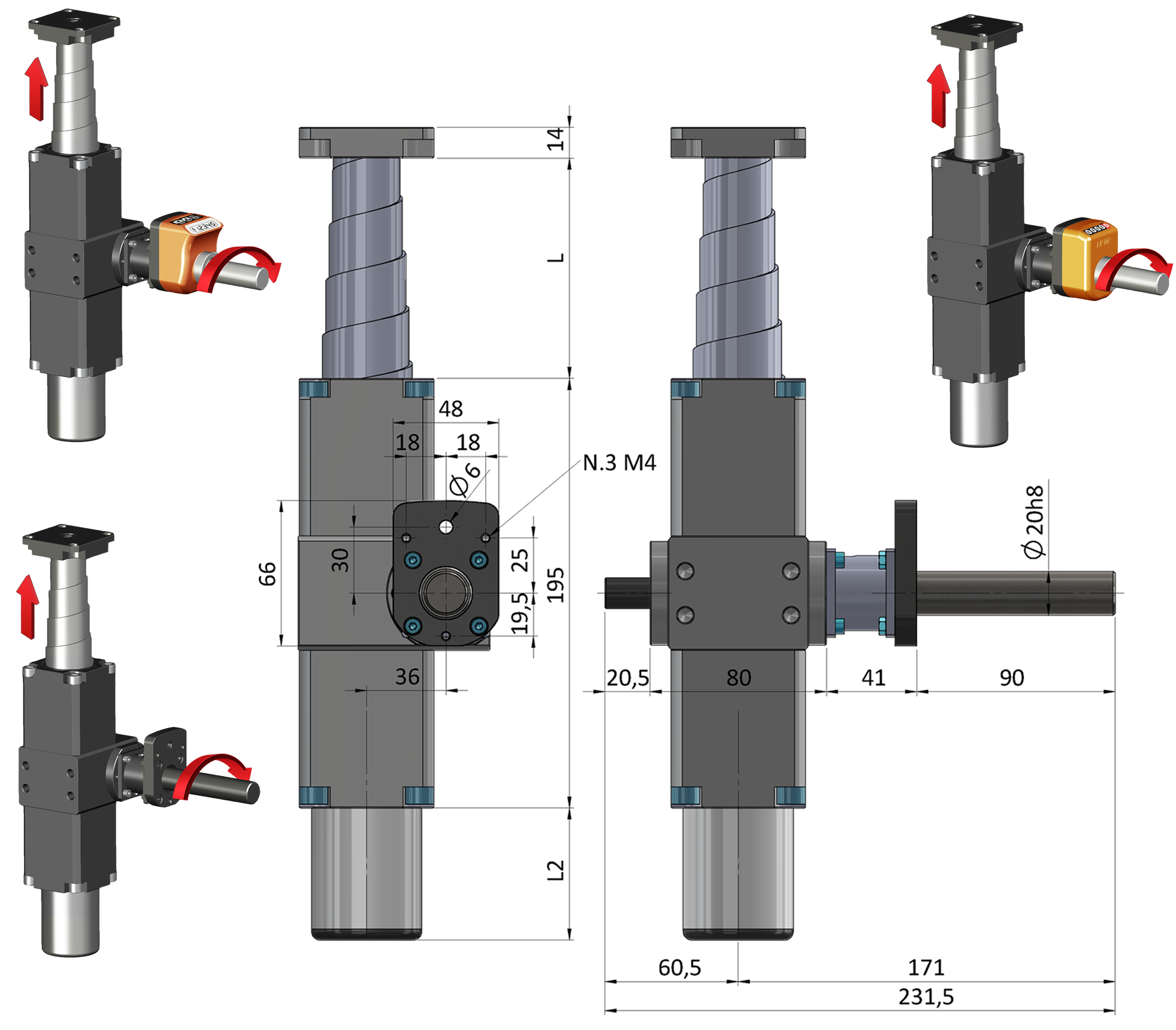
MAR60
Martinetti meccanici a vite traslante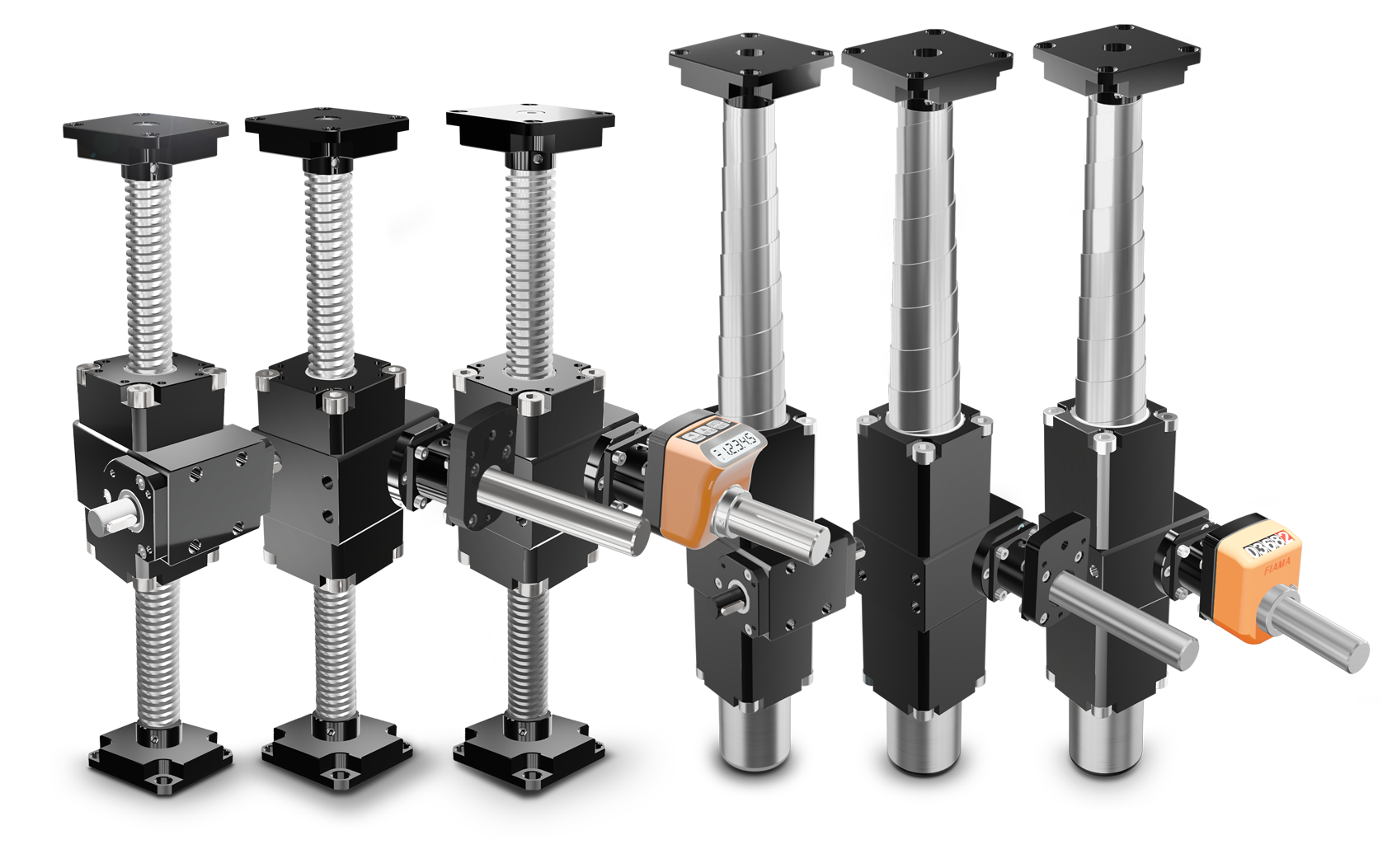
Martinetti Meccanici – Precisi, Affidabili, Modulari
• Trasformano il moto rotatorio in movimento lineare preciso.
• Componenti di alta qualità e lubrificazione lunga durata per un funzionamento regolare e senza manutenzione.
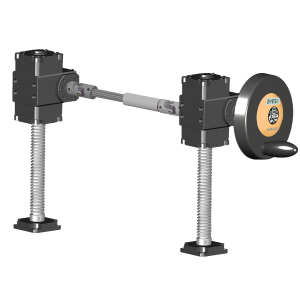
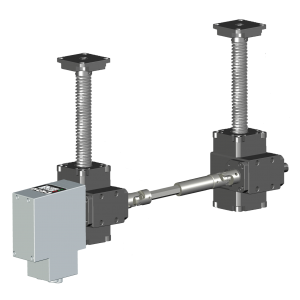
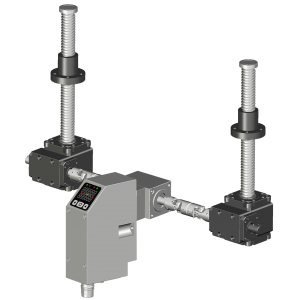
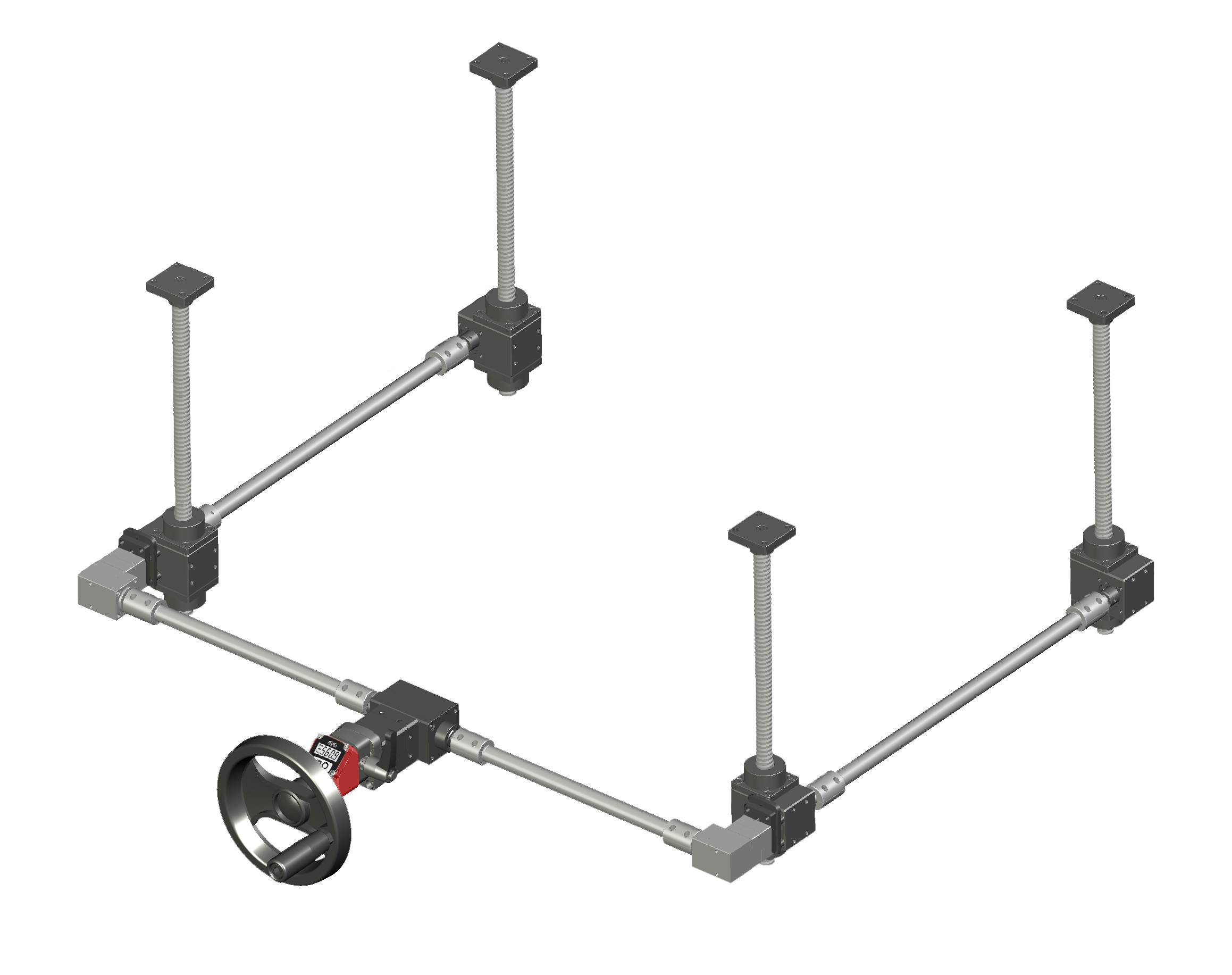
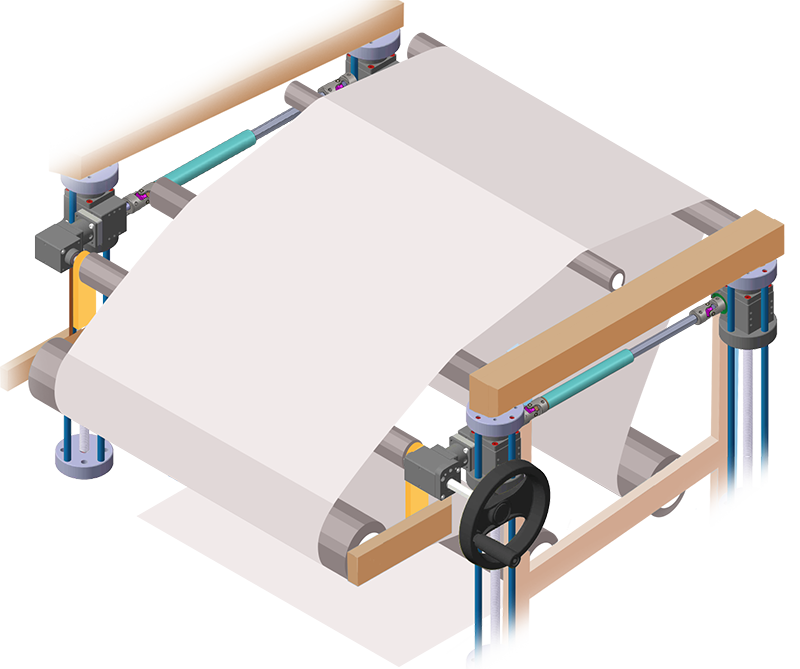
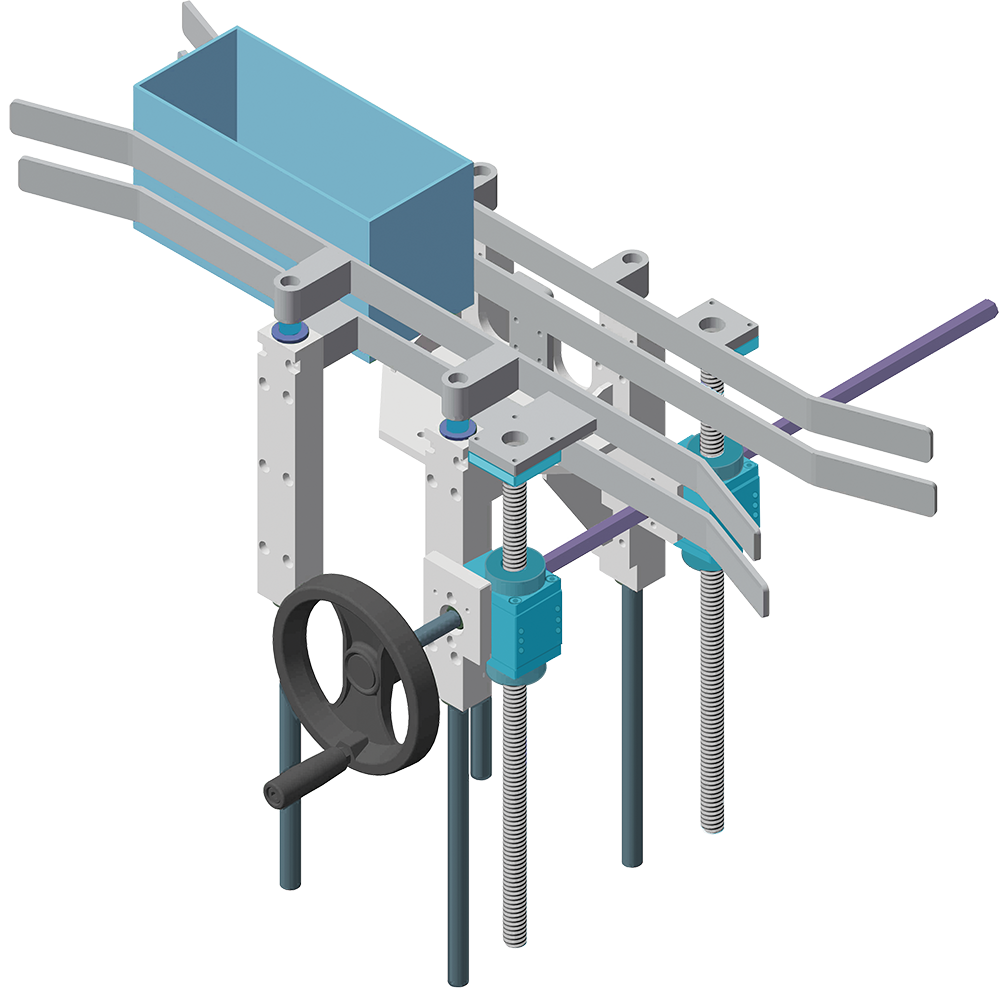
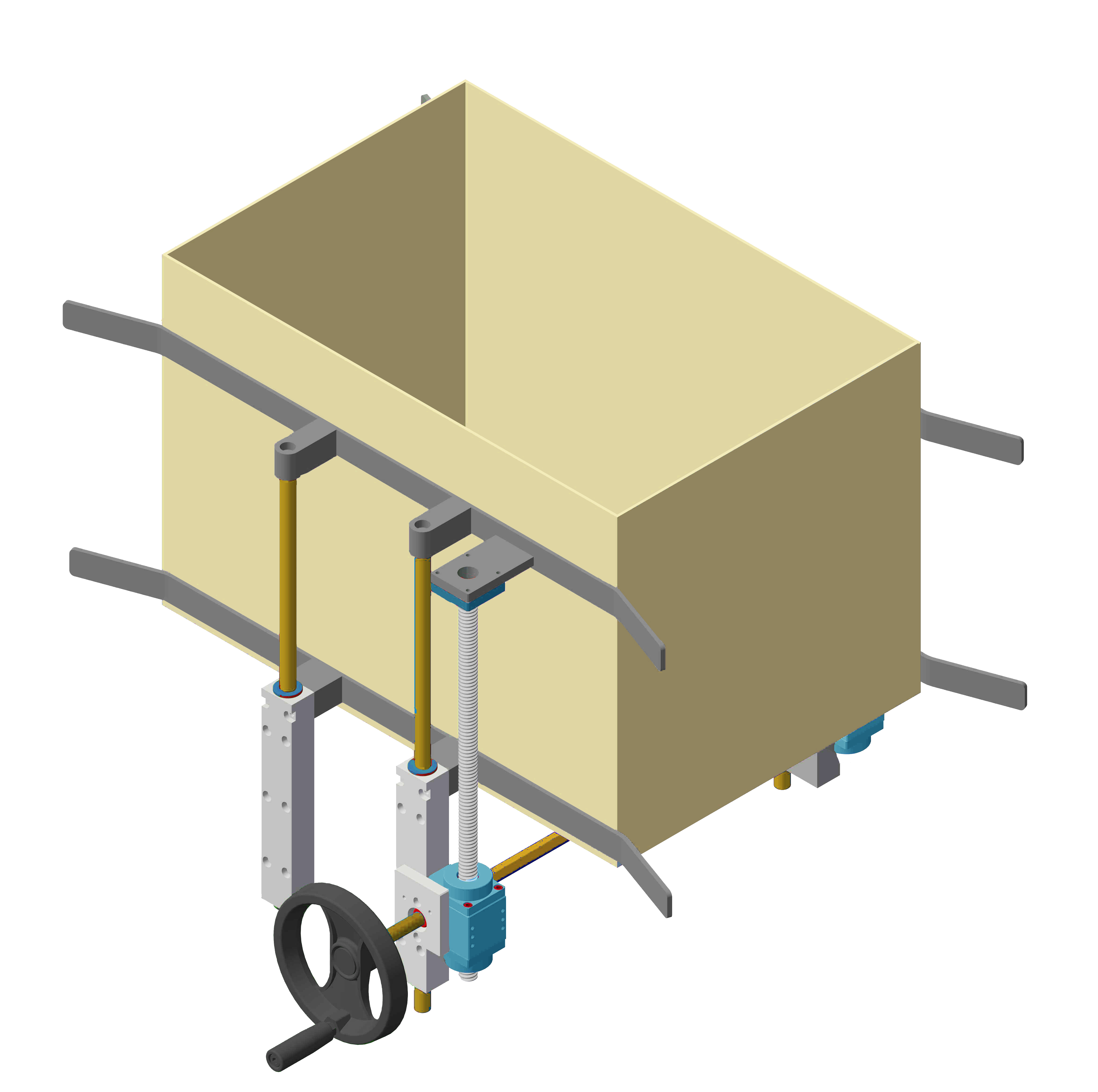
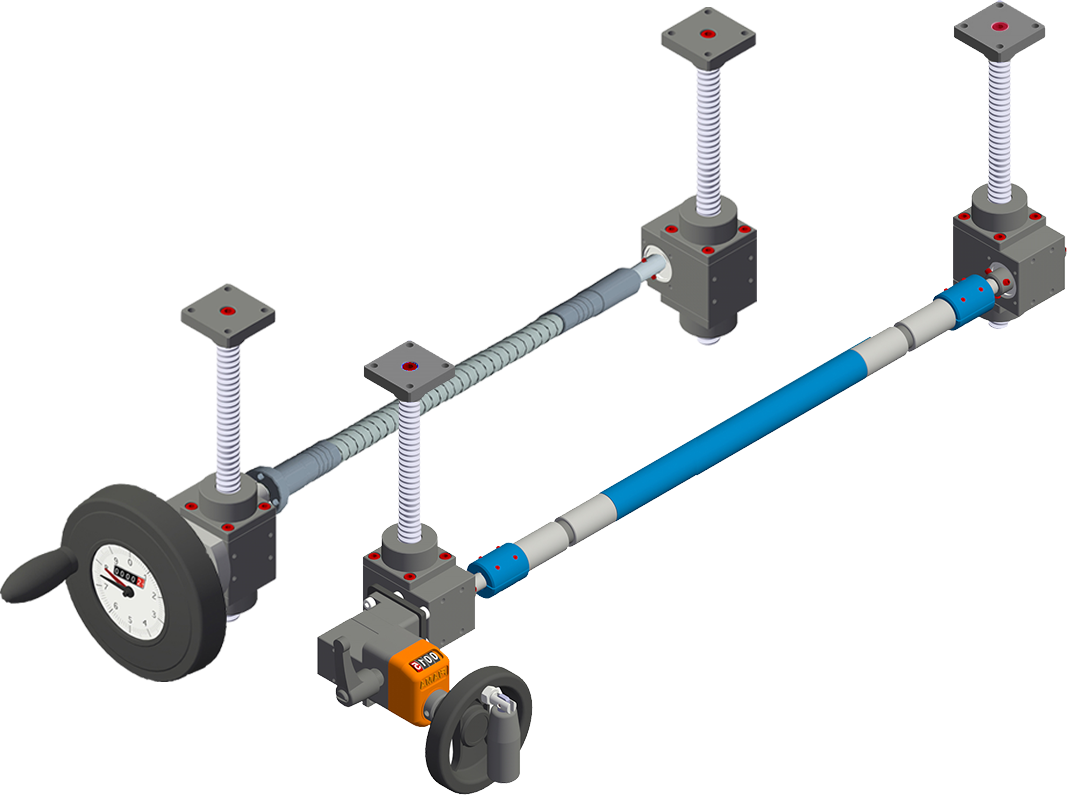
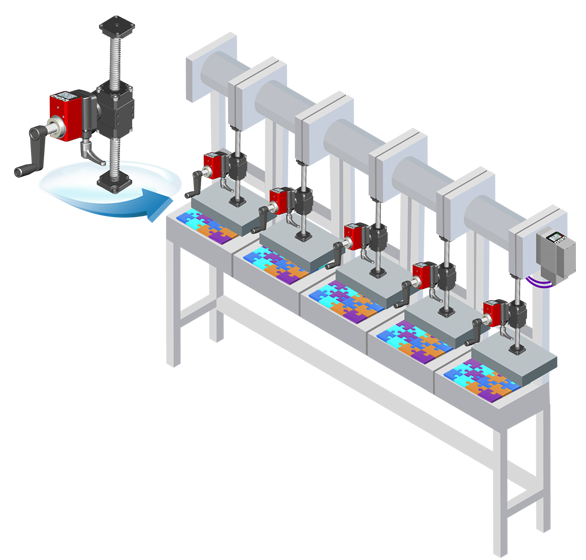
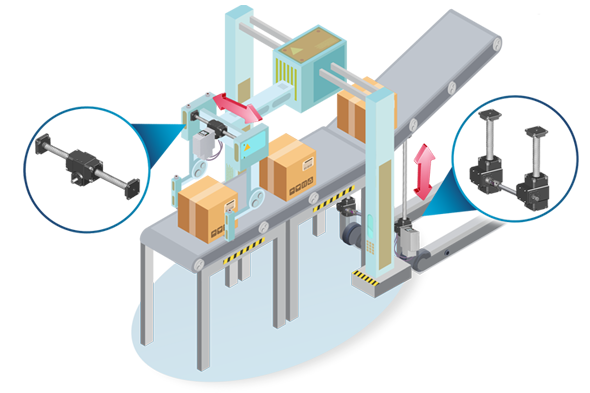
• Design modulare per movimenti sincronizzati e facile integrazione negli impianti.
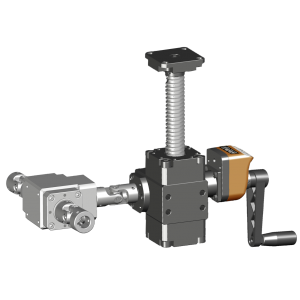
• Utilizzabili singolarmente o in gruppo tramite alberi, giunti e rinvii angolari.
• Azionamento manuale o motorizzato.
Caratteristiche principali
• Vite trapezia in acciaio inoxTPN Ø25 – passo 5 mm
• Carter in alluminio anodizzato, leggero e resistente alla corrosione
• Alberi e ingranaggi in acciaio indurito con trattamento superficiale ad alta resistenza
• Carico assiale sull’albero in ingresso: 200 kg
• Corse standard: 100 – 1000 mm
Versioni e accessori disponibili
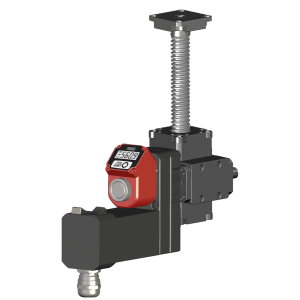
• Montaggio con flangia e prolunga albero per indicatori digitali “OP7” o programmabili “EP7” (MAR60 FL-OP7)
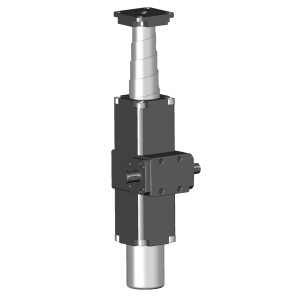
• Protezione rigida in acciaio inox con molla a spirale, fino a 650 mm di corsa
Photogallery
|
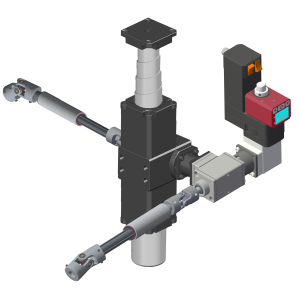
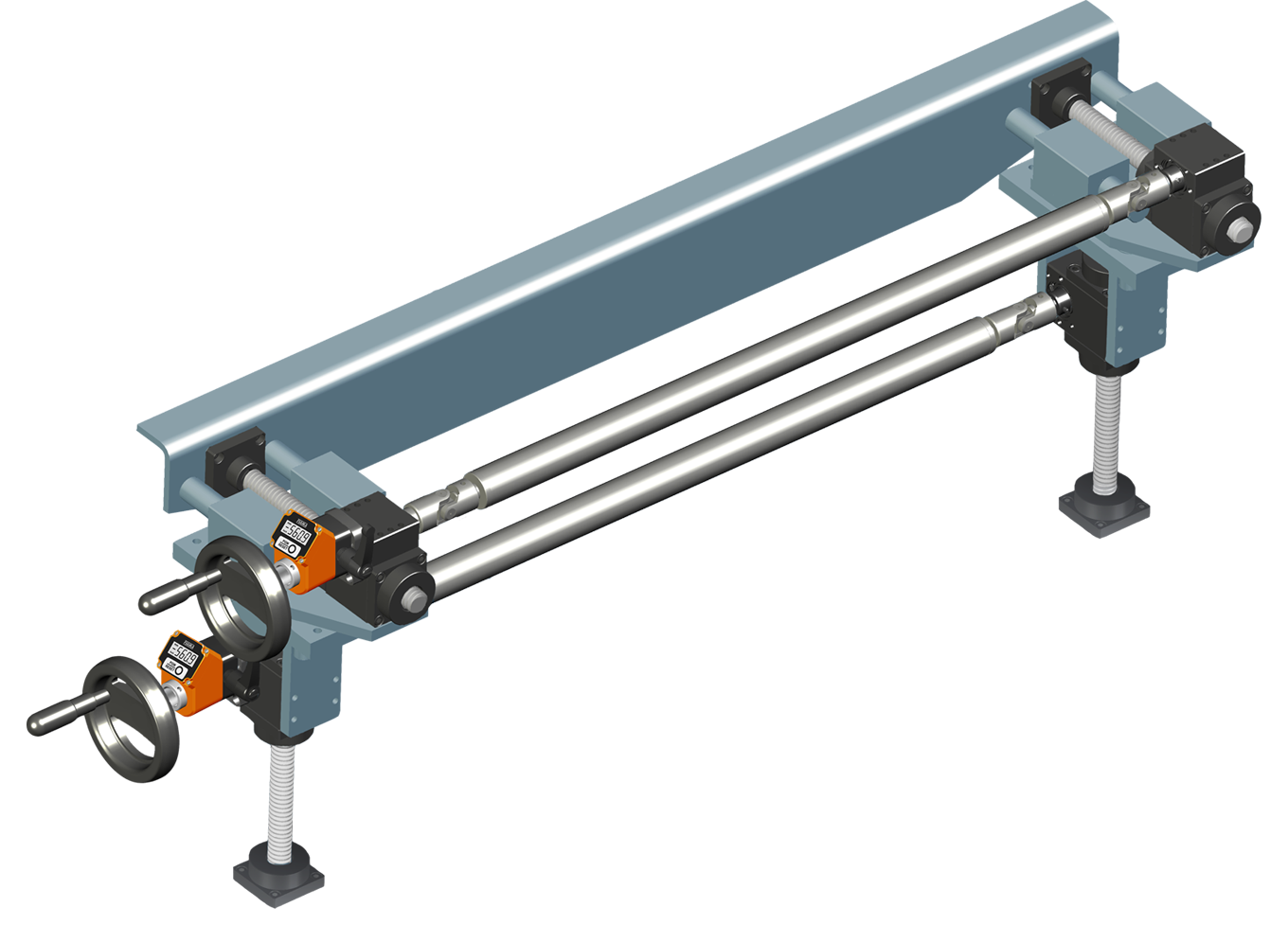
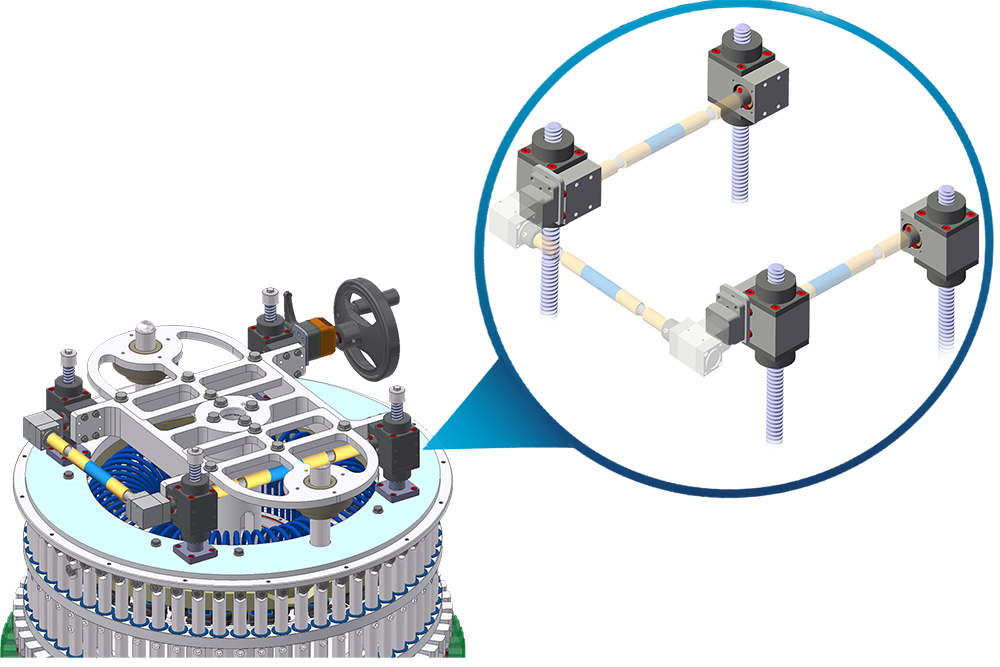
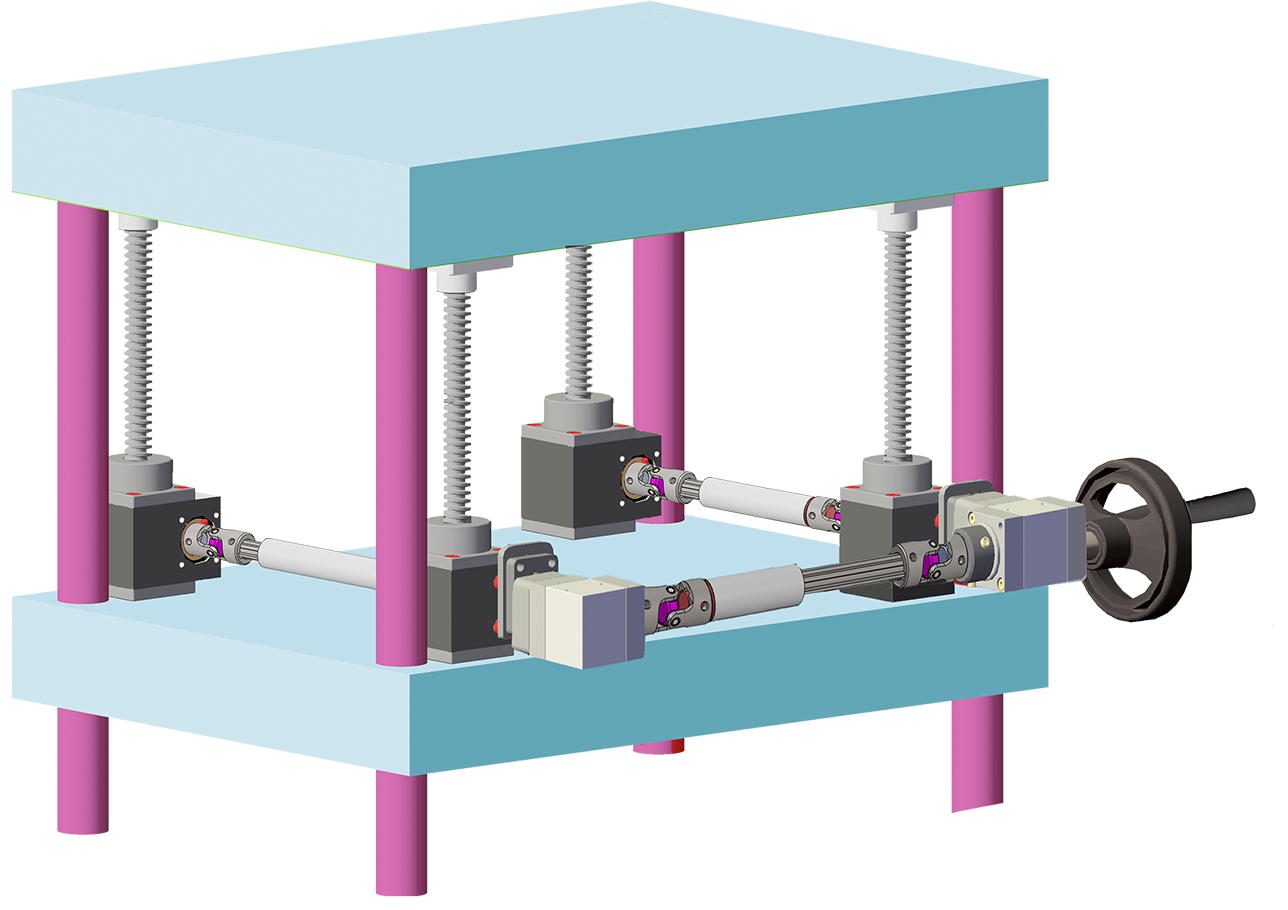
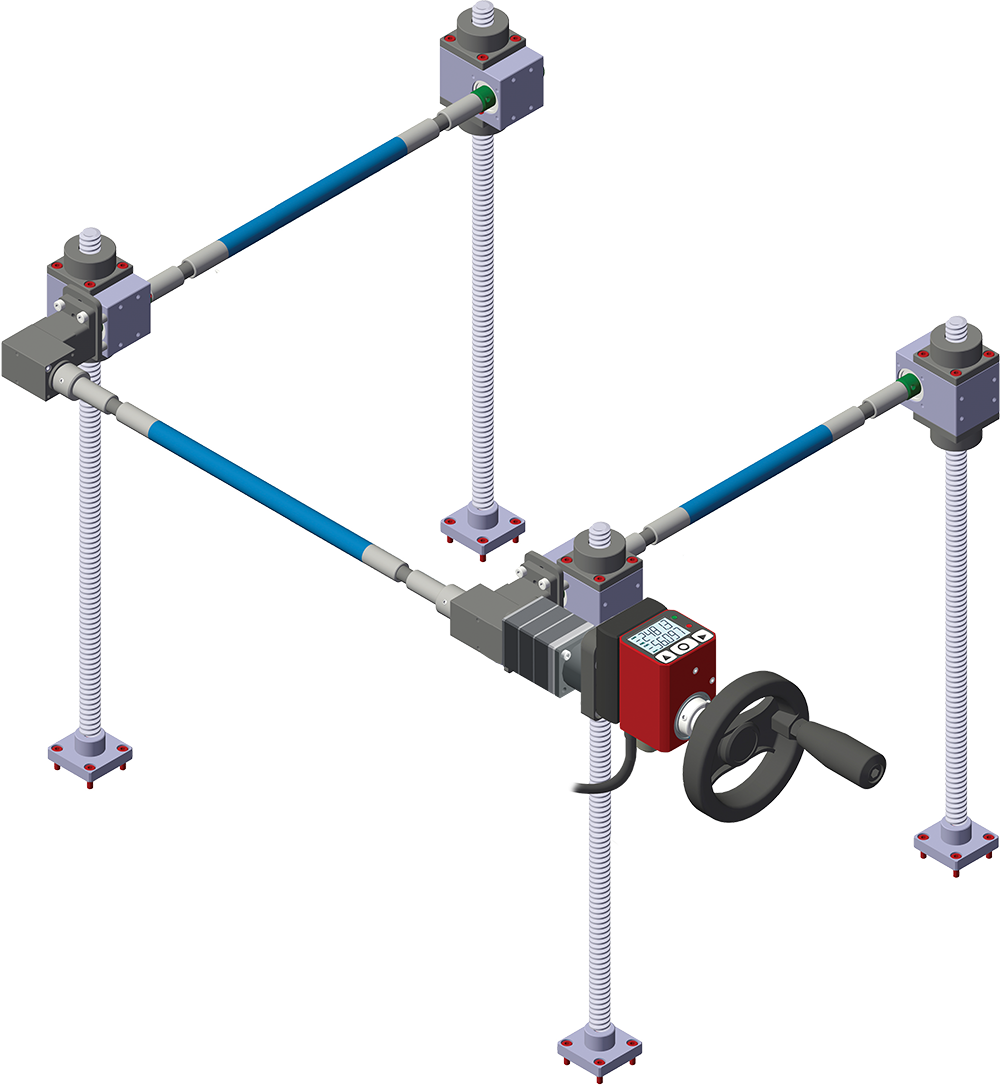
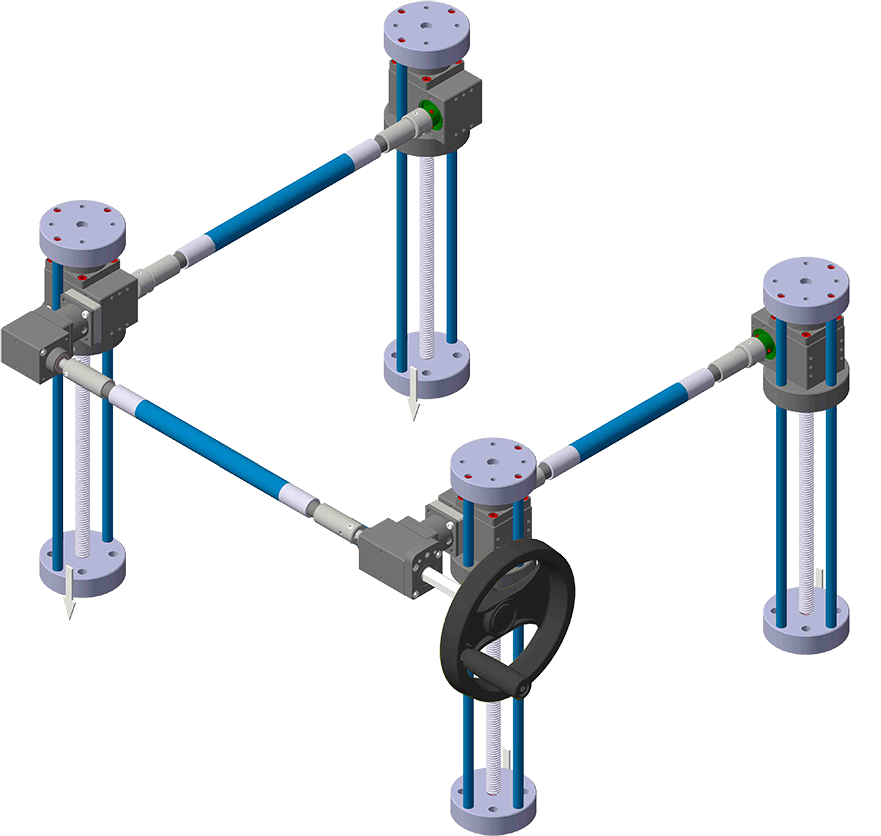
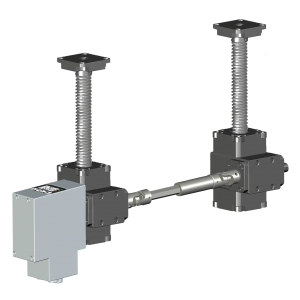
ESEMPI DI APPLICAZIONE |
|
|
 |
.png) |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |

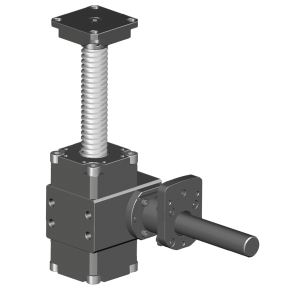
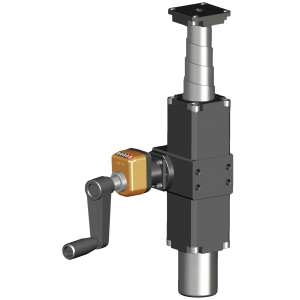
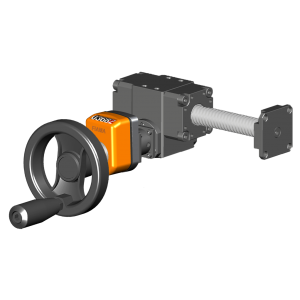
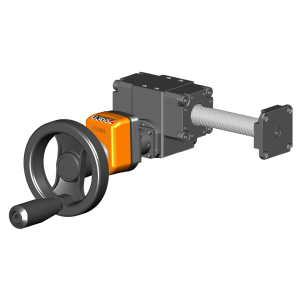
| MAR60 |
 |
|
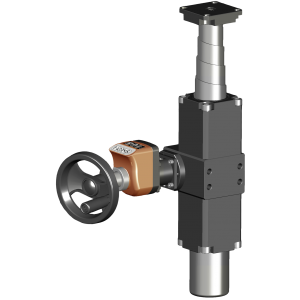
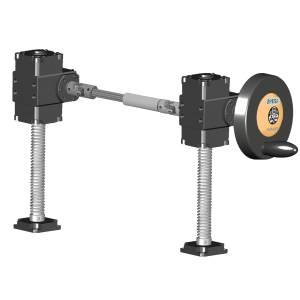
MAR60 FL-OP7/EP7 |
 |
|
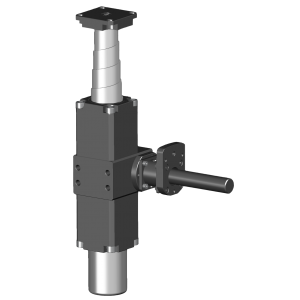
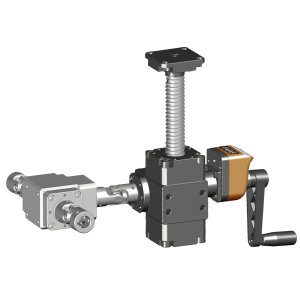
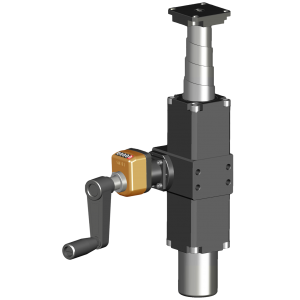
MAR60P |
 |
|
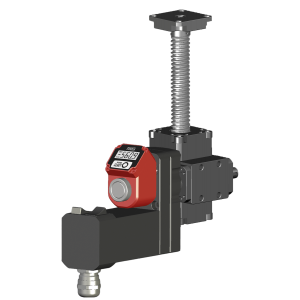
MAR60P FL-OP7/EP7 |
|
|
|
VERIFICA DIMENSIONAMENTO |
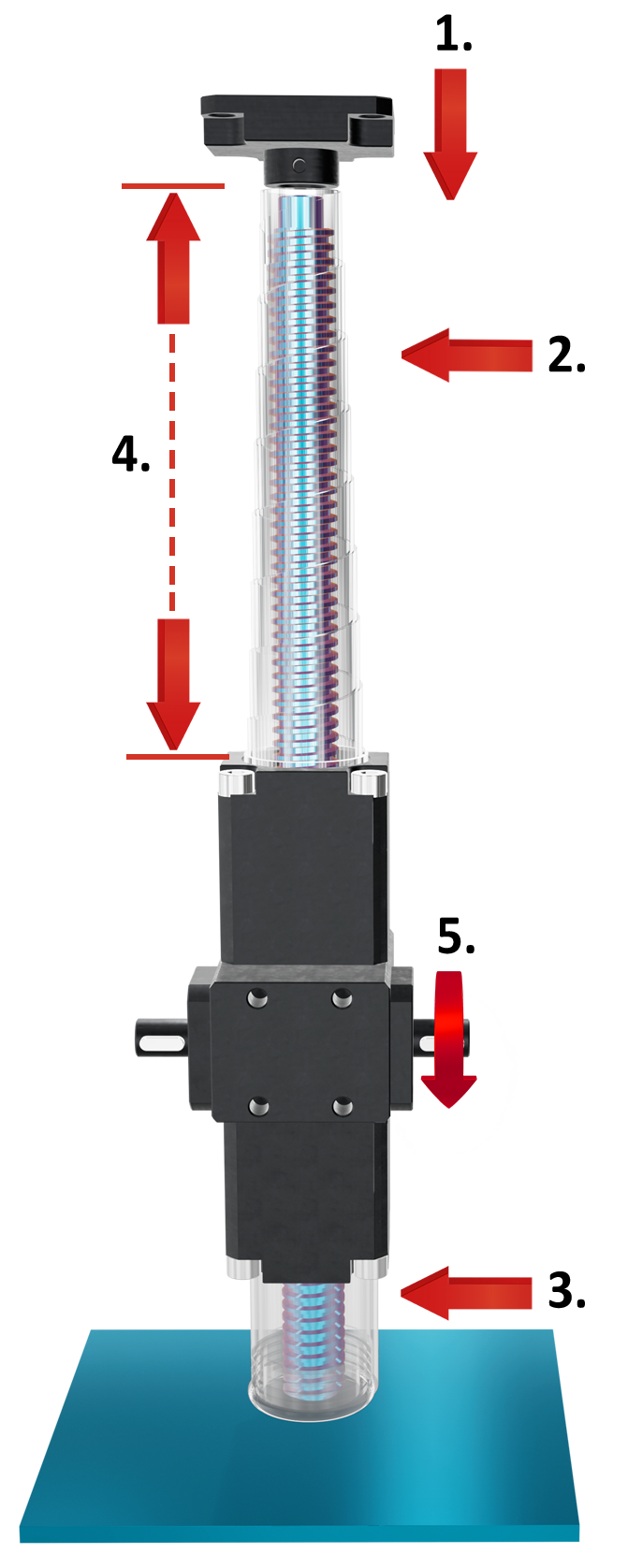 |
| 1. Carico (kg) |
| 2. Protezione superiore a spirale (opzionale) |
| 3. Protezione inferiore rigida (opzionale) |
| 4. Corsa (mm) |
| 5. Rpm (max. 1500) |
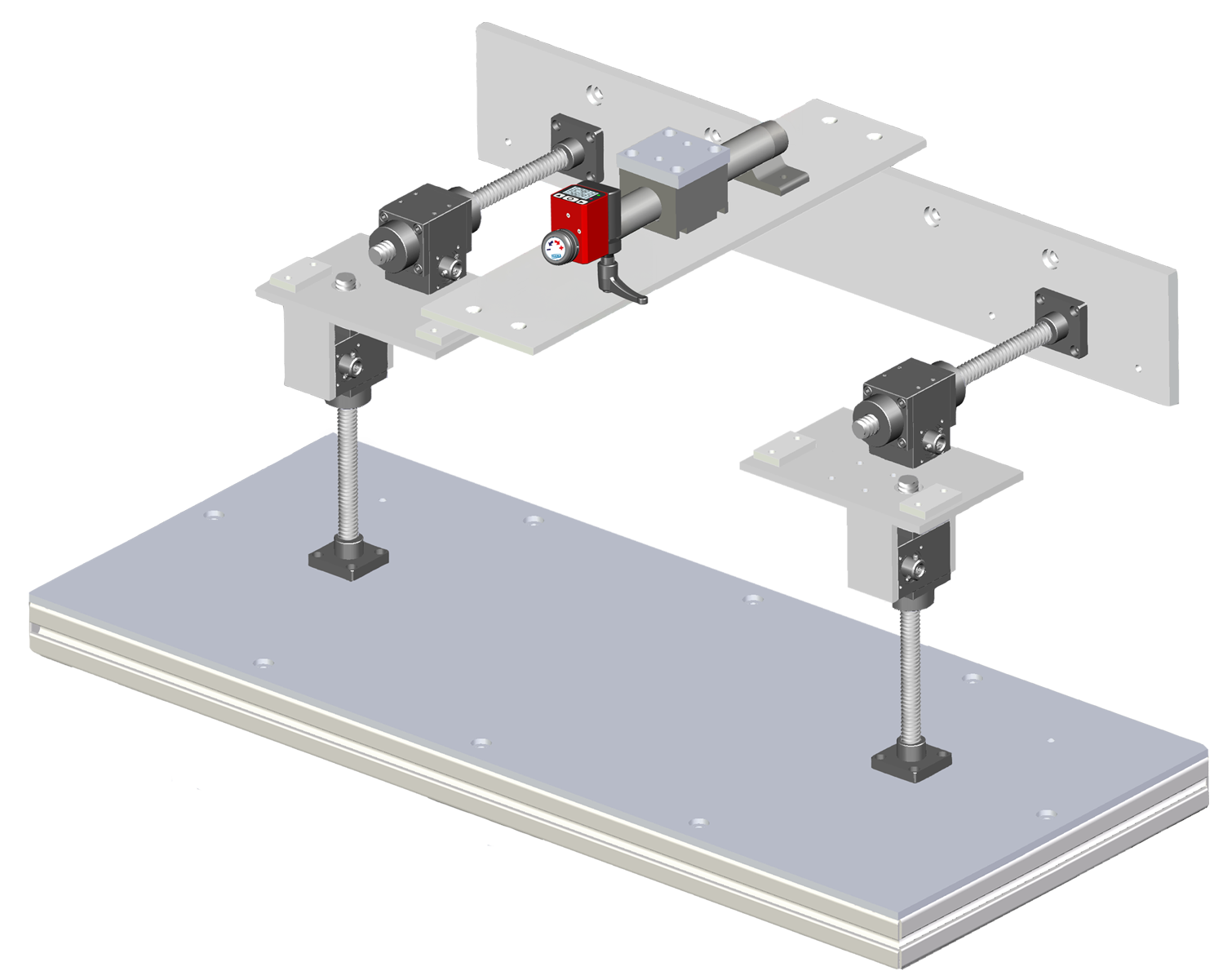
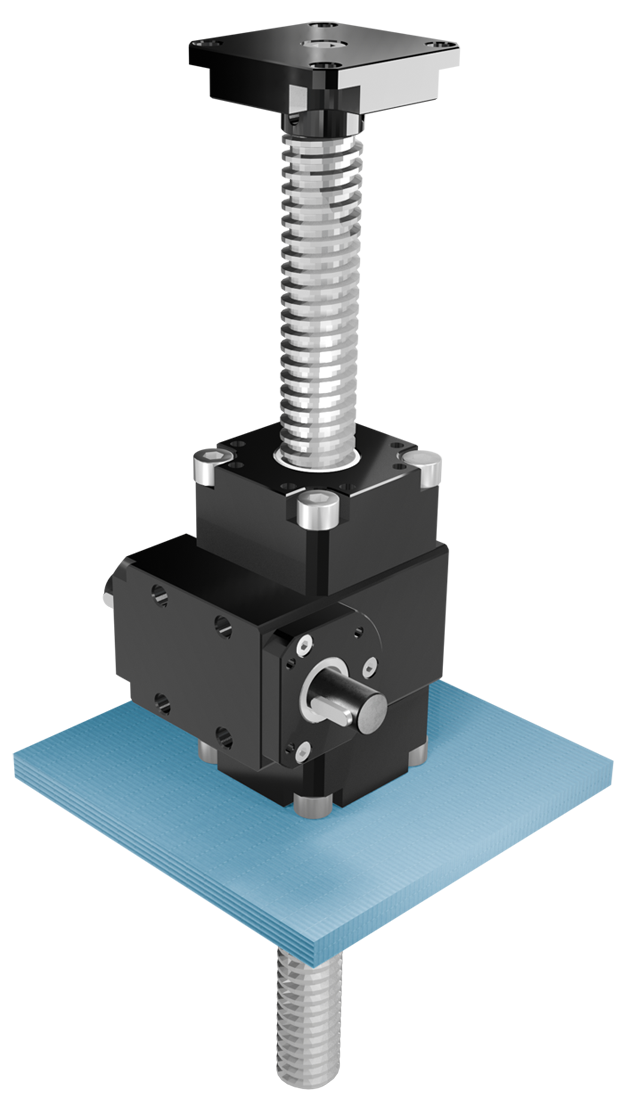
| SUPPORTO E MONTAGGIO | |
|
L’unità deve essere fissata saldamente alla struttura della macchina tramite una base piana e rigida (supporti non inclusi nella fornitura) |
|
| Supporto inferiore | Supporto laterale |
 |
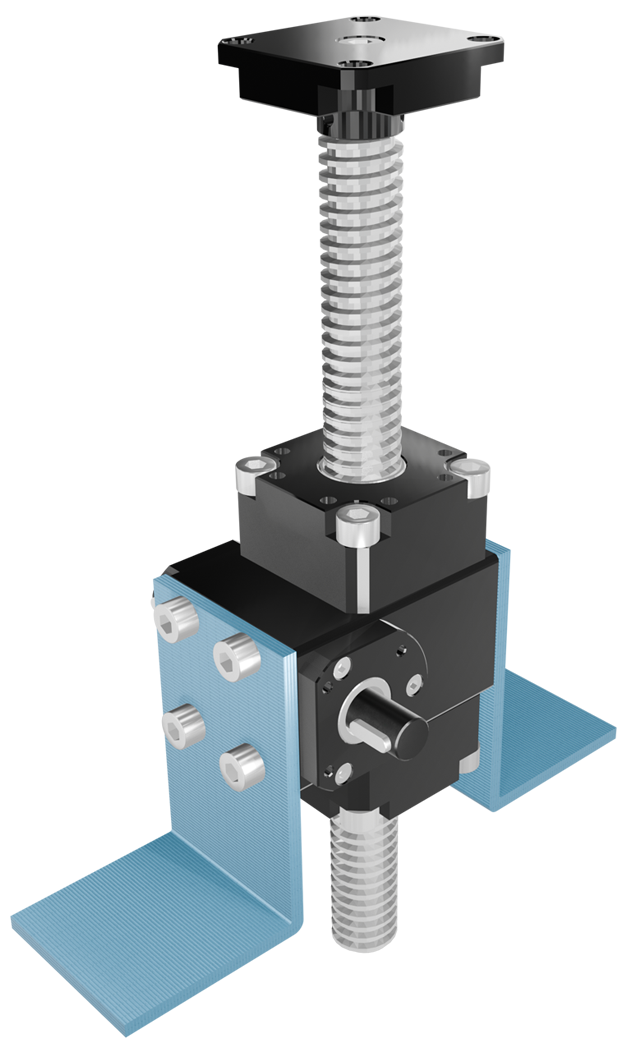 |
| Piastra/staffa sotto carcassa per montaggo ottimale | Supporto laterale permette un carico massimo di 500 kg |
|
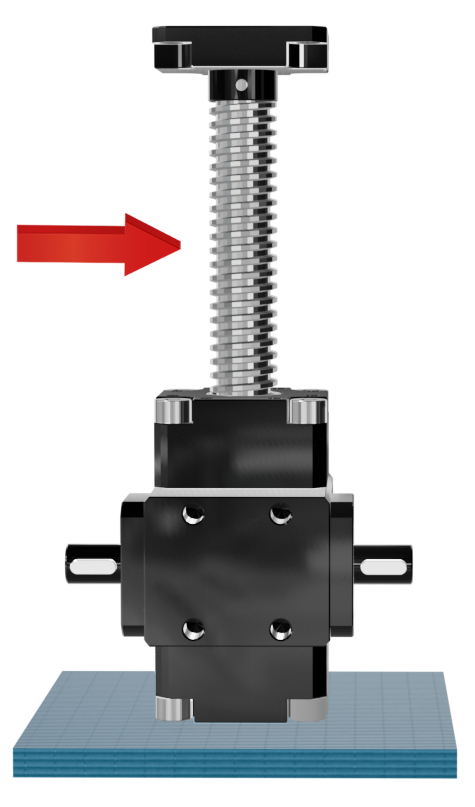
INSTALLAZIONE |
||
 |
 |
|
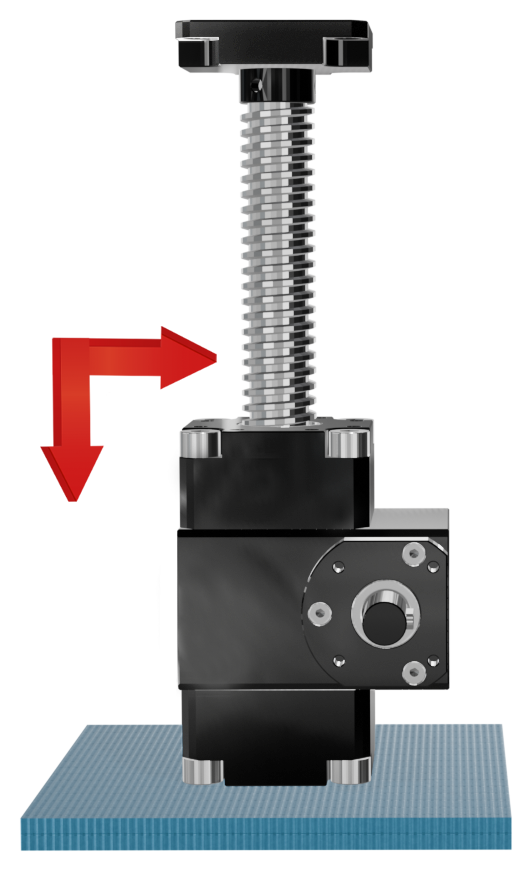
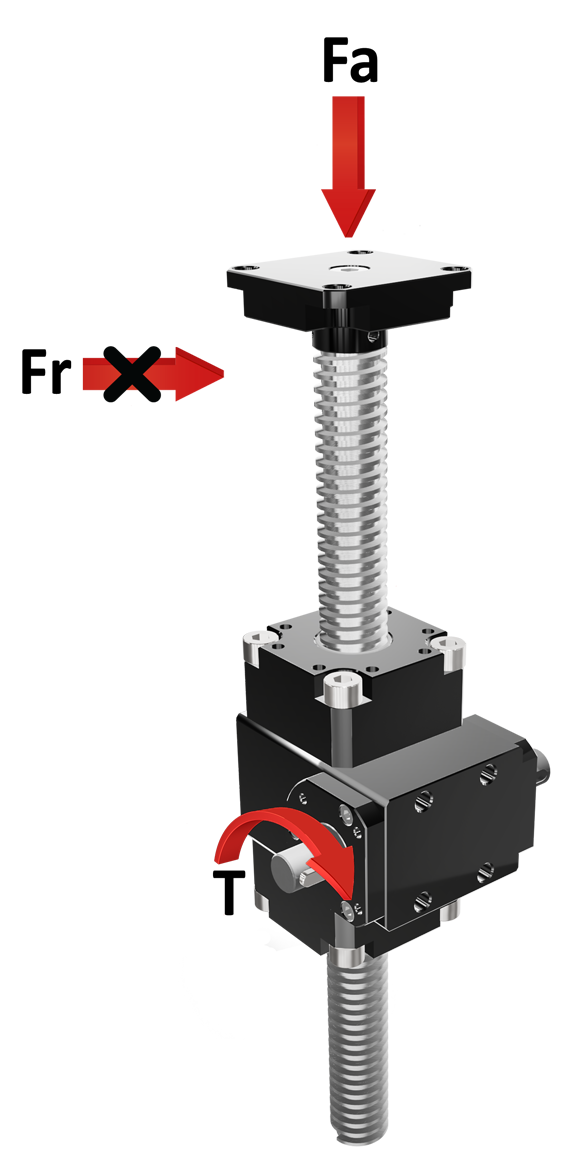
| Evitare carichi radiali/laterali sulla vite trapezia, principale causa di guasti | Asta filettata e piano riduttore ortogonali; verificare assialità carico/asta evitando eccentricità | |
 |
||
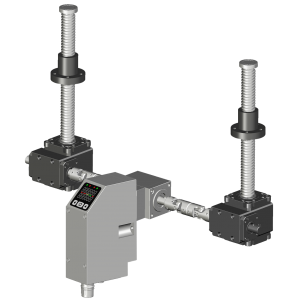
| Più martinetti collegati: terminali allineati per ripartizione uniforme del carico; usare giunti per compensare disallineamenti | ||
|
RAFFIGURAZIONE DEI CARICHI |
|
|
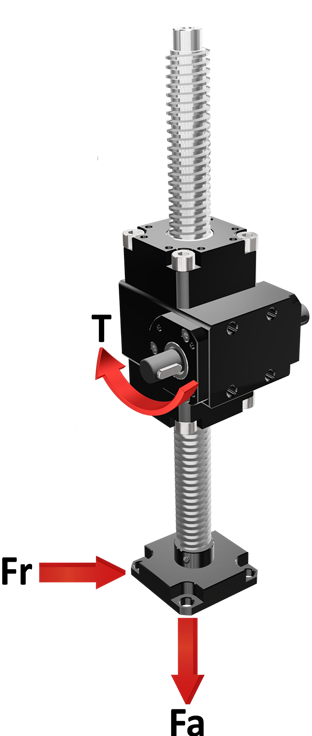
I carichi agenti sugli alberi, in riferimento all’asse dell’albero stesso, possono essere radiali (Fr) o assiali (Fa). Per i martinetti, i carichi possono essere di trazione o di compressione (da indicare in fase d’ordine). Fr = forza/carico radiale agisce in direzione perpendicolare all’albero/asse Nota: i valori massimi ammissibili di Fr, Fa e T dipendono dal modello dalle condizioni di utilizzo. |
|
|
Trazione |
Compressione |
 |
|
| CALCOLO DELLA DURATA DEL RINVIO | |
|
Calcolo applicabile a tutti i modelli |
| DURATA TEORICA PREVISTA✽ = 10.000H X Fu COPPIA CONSIGLIATA (Nm) Fu = ------------------------------------------------- Ta COPPIA APPLICATA (Nm) |
✽ La durata di 10.000h è intesa alle seguenti condizioni di funzionamento:
• Coppia applicata = coppia consigliata (vedi tabelle)
• Massimo 8 ore al giorno
• Temperatura di lavoro 20°
• Assenza di urti
• Ta Coppia di uscita applicata
• Coppia massima applicabile (vedi tabelle/modelli)
| GLOSSARIO |
| FR = forza radiale |
| FA = forza assiale |
| R = rendimento |
| T = coppia trasmissibile |
| Tm = coppia massima |
| Tr = coppia consigliata |
| Ta = coppia applicata |
| To = coppia in uscita |
| Ti = coppia in entrata |
| Pn = potenza |
| N = Newton |
| Nm = Newton metro |
| fu = fattore di utilizzo |
| i = rapporto di trasmissione |
| rpm = giri al minuto (1/min) |
| n1 = albero in entrata |
| n2 = albero in uscita |
| M = albero di uscita sporgente/maschio |
| F = albero di uscita cavo cieco /femmina |
| F = albero di uscita cavo passante /femmina |
| ⦿ Per un corretto dimensionamento è necessario conoscere: potenza trasmessa (Pn), momento torcente in uscita (T) e velocità di rotazione in entrata (rpm). |
| ⦿ Per l’identificazione del rinvio/riduttore più adatto alle proprie esigenze, verificare i valori riportati in tabella per ogni modello. Qualora i carichi e i rendimenti reali siano molto vicini ai valori tabellari contattare l’ufficio tecnico. |
| ⦿ Tutte le tabelle dimensionali riportano misure lineari espresse in ‹mm›, se non diversamente specificato. Tutti i rapporti di riduzione sono forma di ‹frazione› se non diversamente specificato. Tutte le forze sono indicate in N, i carichi in kg, le coppie in Nm e i rendimenti in %, se non diversamente specificato. |









Volantino di manovra con manico pieghevole in materiale termoplastico, boccola in acciaio.
➜ per informazioni più complete, vedi V.R

Manovella con manico pieghevole, Materiale termoplastico, boccola in acciaio.
➜ per informazioni più complete, vedi V.M

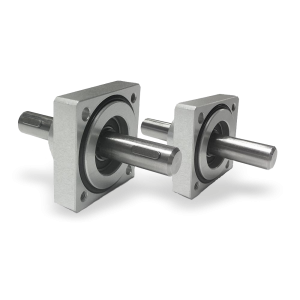
Supporti in alluminio (con flangia quadrata). con anello di tenuta o.ring e cuscinetti a sfera.
• Disponibili alberi Ø6, Ø8, Ø10, Ø14, Ø20.
➜ per informazioni più complete, vedi Supporti
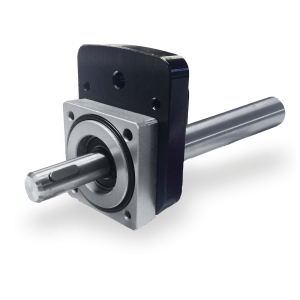
Supporti flangiati con albero di prolunga per collegamento con indicatori di posizione.
➜ per informazioni più complete, vedi Supporti flangiati

I giunti cardanici a snodo «GC» e «GCC» sono utilizzati per la trasmissione di coppia e movimento di elementi non allineati.
Caratteristiche principali: applicazione universale, elevata affidabilità, senza manuntenzione, semplicità di utilizzo, estrememamente precisi.
• Corpo in acciaio inox AISI303, interamente lavorato dal pieno.
• Adatti a movimenti intermittenti (UI) e in continuo (UC).

• Gli alberi telescopici sono ideali per il collegamento tra due elementi a interasse fisso o variabile.
• Adatti per regolazioni e per uso continuo.
• Coppie da 5 Nm a 10 Nm.
➜ per informazioni più complete, vedi ATE

• Gli alberi telescopici sono ideali per il collegamento tra due elementi
a interasse fisso o variabile.
• Adatti per regolazioni e per uso continuo.
• Coppie da 25 Nm a 50 Nm.
➜ per informazioni più complete, vedi ATS

Gli alberi rigidi AR sono utilizzati per il collegamento tra due elementi perfettamente allineati che non presentino disallineamenti.
• Adatti all’utilizzo nei azionamenti manuali e motorizzati.
• Semplici e veloci da montare, non necessitano di ulteriori supporti.
➜ per informazioni più complete, vedi AR






• Contatore a cinque cifre (standard cifra rossa per indicare i decimi; a richiesta 2 cifre rosse per i centesimi o 5 rulli neri per i mm)
• Lettura fino a 99999. Lente per migliorare la visibilità: altezza cifre mm 7
•Foro standard dell’albero ø20 (OP7) o ø25 (OP7F25). Altri fori minori con bussola di riduzione➜ per informazioni più complete, vedi OP7

• Utilizzato per la misura di spostamenti lineari o angolari
• Montaggio semplice attraverso l’albero cavo
• Alimentato a batteria di durata elevata, sostituzione facile dal frontale
➜ per informazioni più complete, vedi EP7

66/6: Sono rinvii ad angolo con ingranaggi conici adatti alla trasmissione di movimenti rotatori tra due alberi disposti perpendicolarmente.
• Rapporto di riduzione: 1:1 - 1:2 - 2:1
• Corpo in alluminio anodizzato nero; alberi in acciaio inox AISI 303
• Momente torcente 45 Nm
➜ per informazioni più complete, vedi sez. "Rinvii angolari e flangiati..." nel menù a tendina a sinistra.

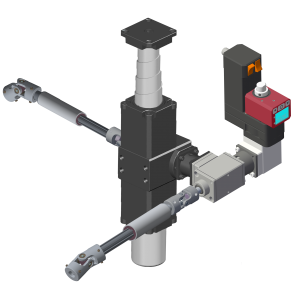
● Azionamento e posizionamento automatico degli assi, in un unico dispositivo
● Design ultracompatto, montaggio semplice con albero cavo Ø 14 con chiavetta 5mm ribassata.
● Interfacce di uscita: Profinet, EthernetIP, PowerLink, EtherCat.
➜ per informazioni più complete, vedi SERVO.ALL

L’unità Servo-OP è un attuatore elettrico rotativo che in abbinamento al nostro indicatore OP3 (opzionale), permette la visualizzazione della posizione, direttamente mediante due pulsanti.
• Corpo in alluminio anodizzato, dimensione ridotte
• Riduttore con uscita ad albero cavo
➜ per informazioni più complete, vedi SERVO.OP
Photogallery

Richiedi l'accesso
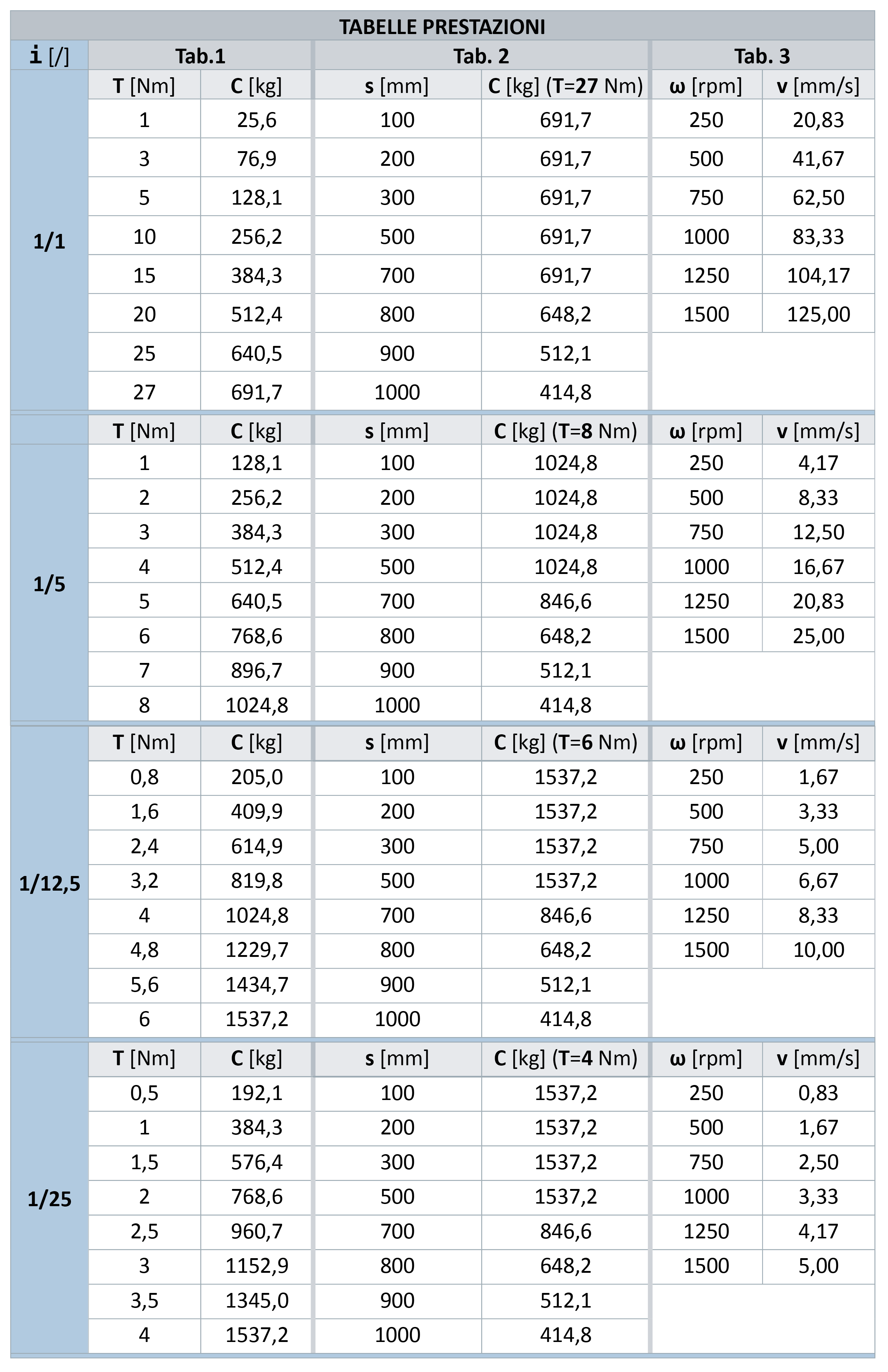
| LEGENDA PER TABELLE PRESTAZIONI | ||
|
Tab. 1 |
= |
carico movimentato in base coppia in ingresso |
|
Tab. 2 |
= |
carico movimentato in base corsa vite trapezia (con utilizzo guide) |
|
Tab. 3 |
= |
velocità di traslazione vite in base a nr. giri in ingresso |
|
i |
= |
rapporto di riduzione [/] |
|
T |
= |
coppia [Nm] |
|
C |
= |
carico movimentato [kg] |
|
s |
= |
corsa [mm] |
|
ω |
= |
velocità di rotazione [rpm] |
|
v |
= |
velocità di traslazione [mm/s] |