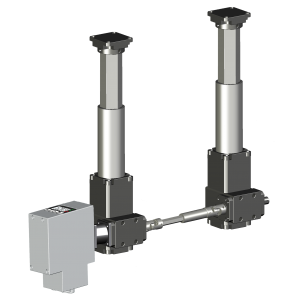
MAR60G
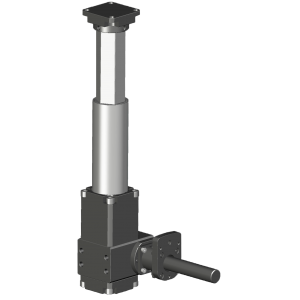
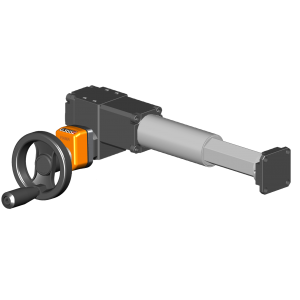
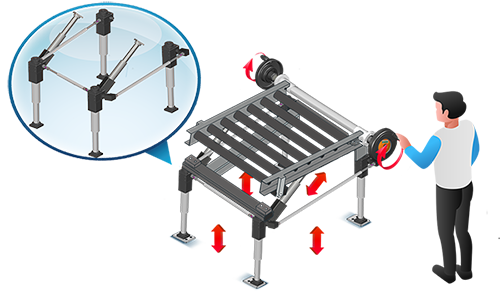
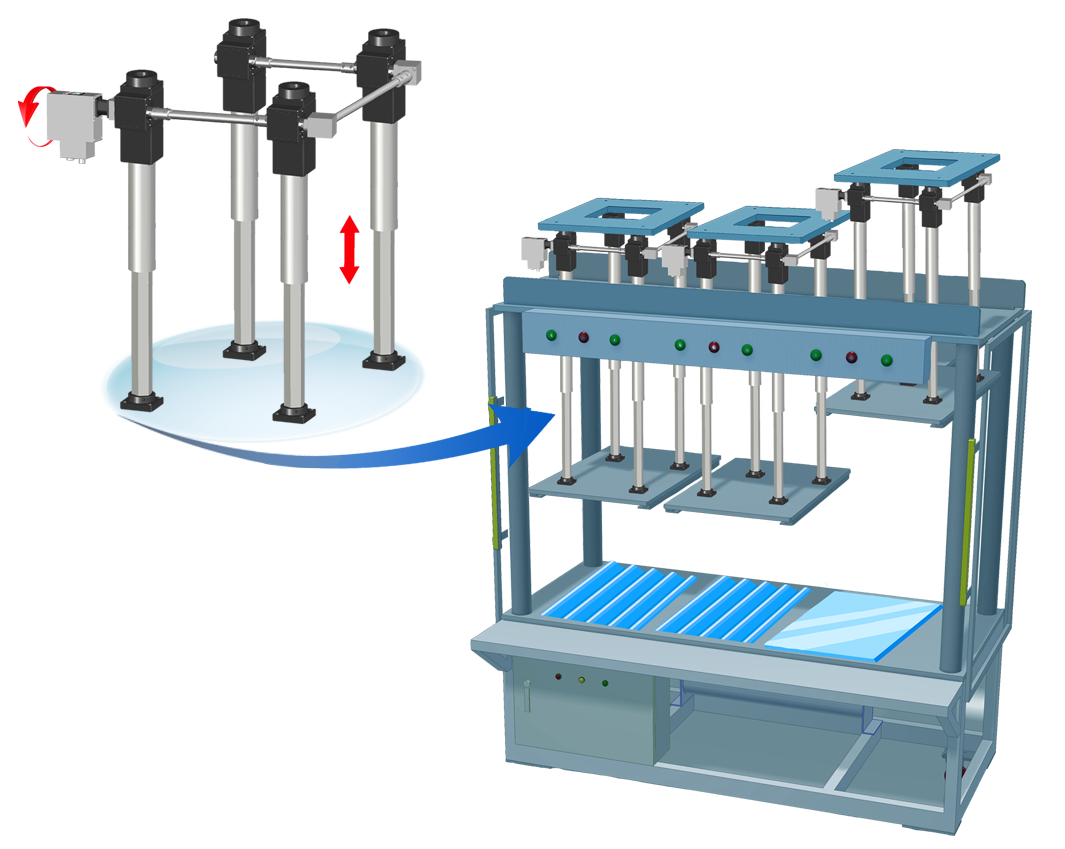
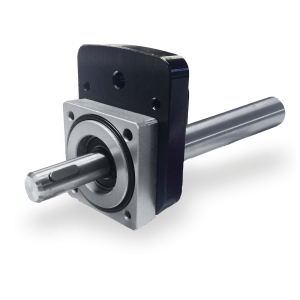
Vérins mécaniques «guidés»
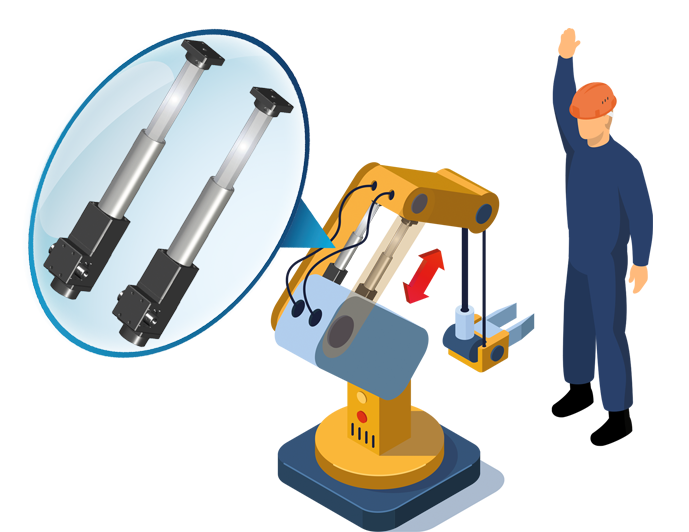
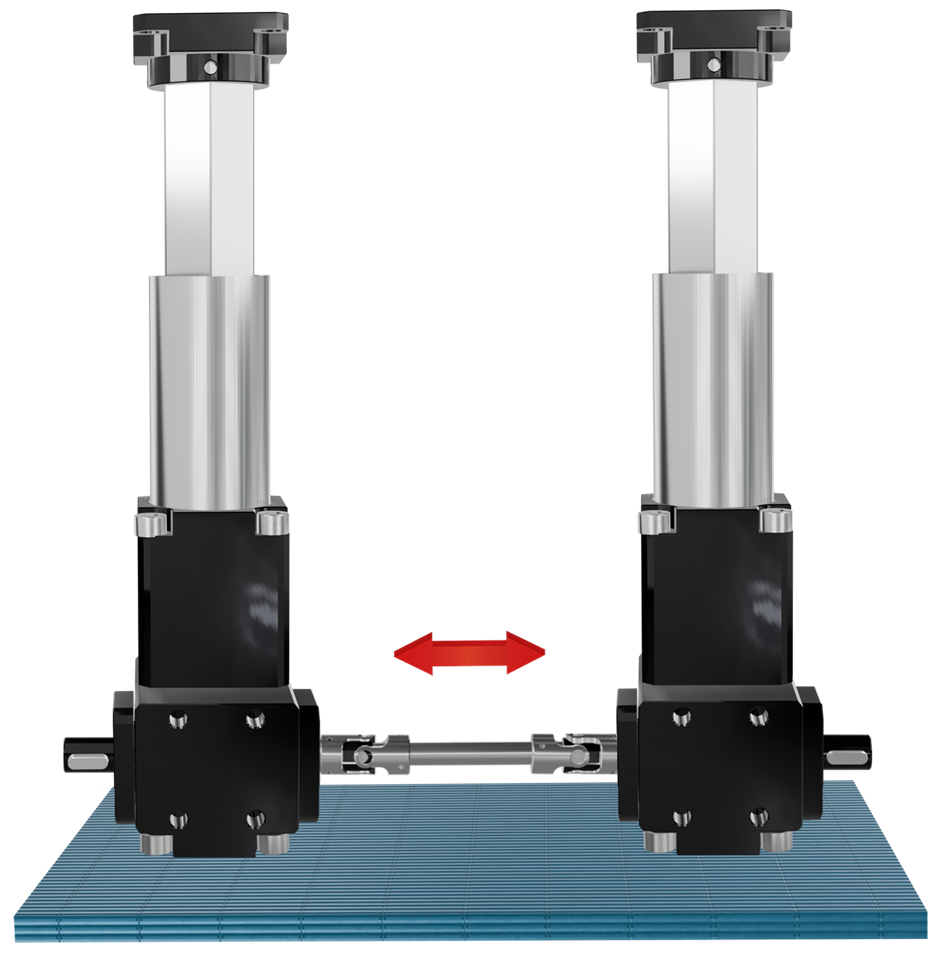
Les vérins guidés garantissent des mouvements précis, stables et contrôlés, offrant des solutions de levage et d’entraînement sûres et fiables.
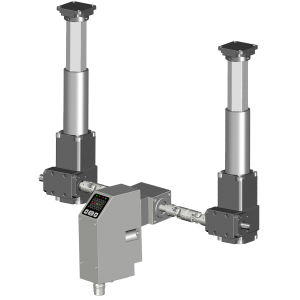
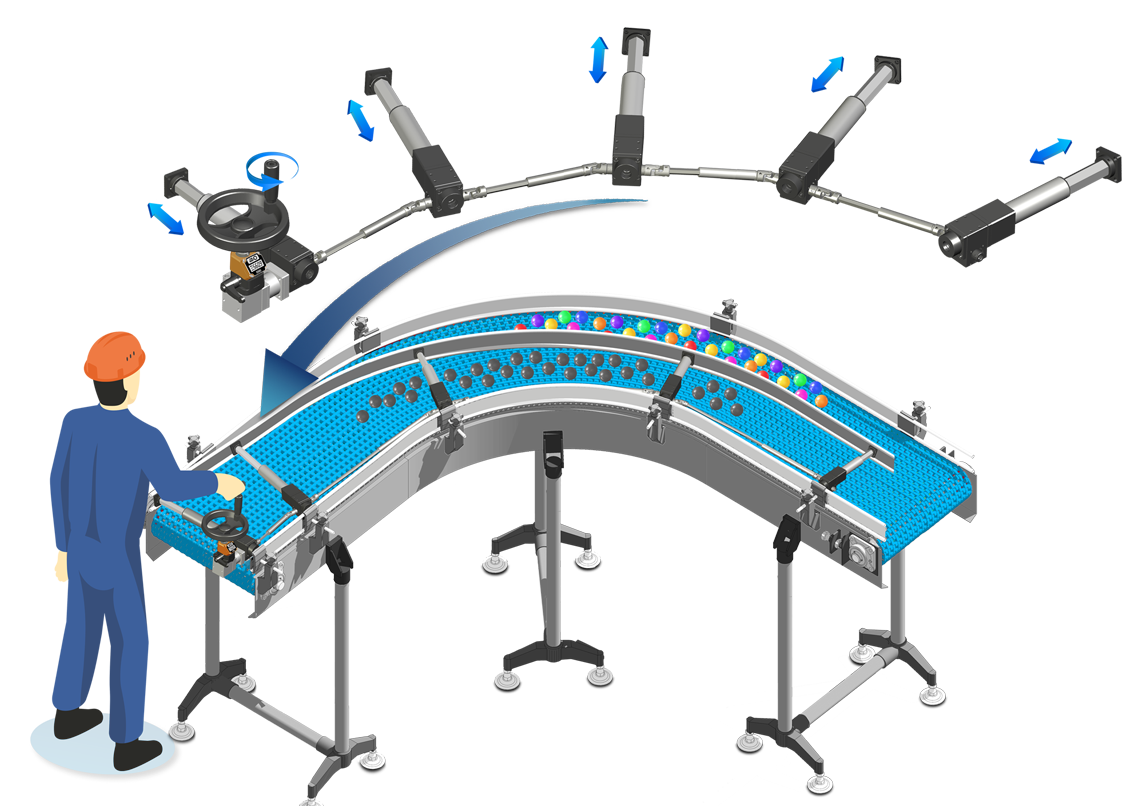
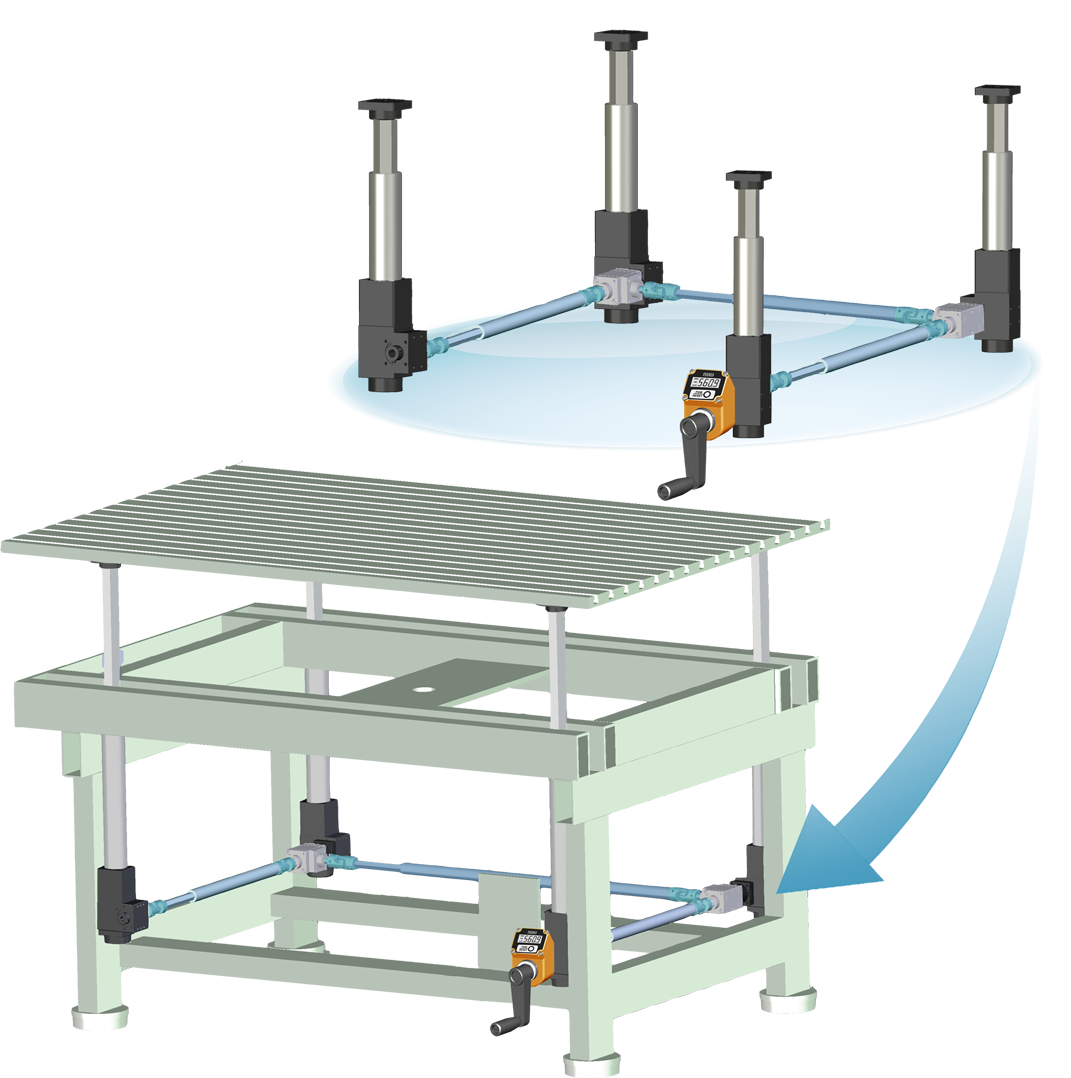
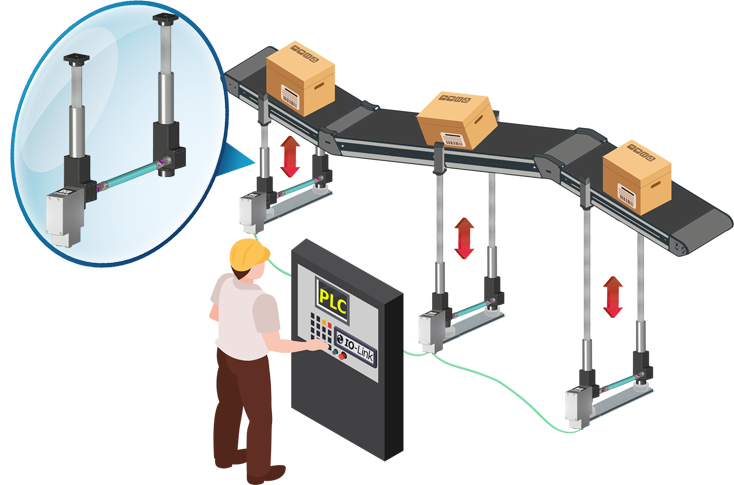
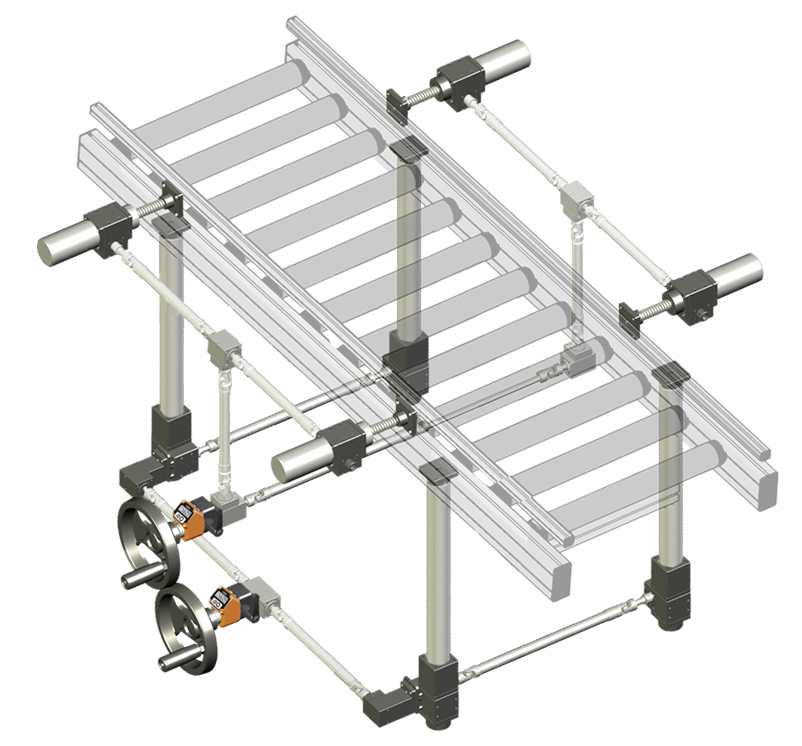
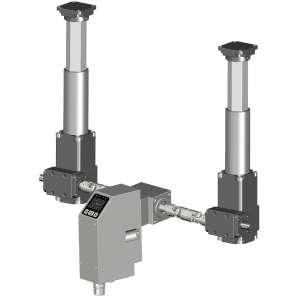
La structure modulaire permet une intégration dans n’importe quel système, que ce soit pour des applications individuelles ou en configurations synchronisées.
Caractéristiques techniques
• Systèmes modulaires complets et prêts à l’installation
• Synchronisation et précision constantes dans le mouvement
• Levage et entraînement avec auto-support de la charge, ne nécessitent pas de guides de glissement externes supplémentaires
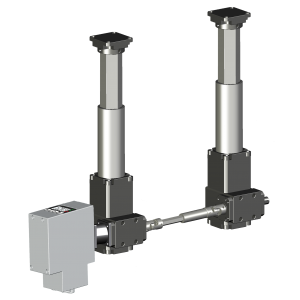
• Utilisation individuelle ou en combinaisons multiples
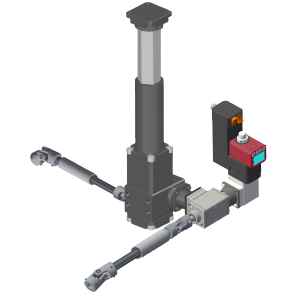
• Raccordements via joints, arbres et renvois angulaires
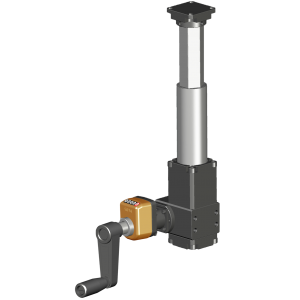
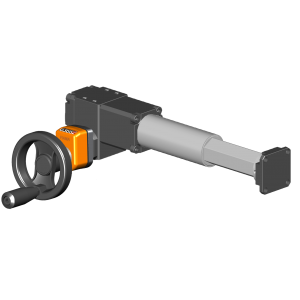
• Versions semi-automatiques avec indicateurs numériques ou programmables
• Versions automatiques avec servomoteurs intégrés
• Charge axiale sur l’arbre d’entrée: 200 kg
• Courses jusqu’à 300 mm
• Lubrification longue durée avec graisse Klüber, sans entretien
Versions et accessoires disponibles
• Complets avec bride de fixation et rallonge d’arbre pour indicateurs numériques “OP7” ou programmables “EP7 (voir dimensions MAR60G FL-)
Galerie Photo








| EXEMPLES D'APPLICATIONS |
|
|
 |
 |
 |
 |
 |
 |
 |
 |
| MAR60G |
 |
|
MAR60G FL-OP7/EP7 |
 |
|
VÉRIFICATION DIMENSIONNEMENT |
|
Charge (kg) = masse sur le vérin |
 |
| 1. Charge (kg) |
| 2. Rpm (max. 1500) |
| 3. Course (mm) |
| SUPPORT ET MONTAGE | |
|
L’unité doit être fixée solidement à la structure de la machine au moyen d’une base plane et rigide (supports non inclus dans la fourniture) |
|
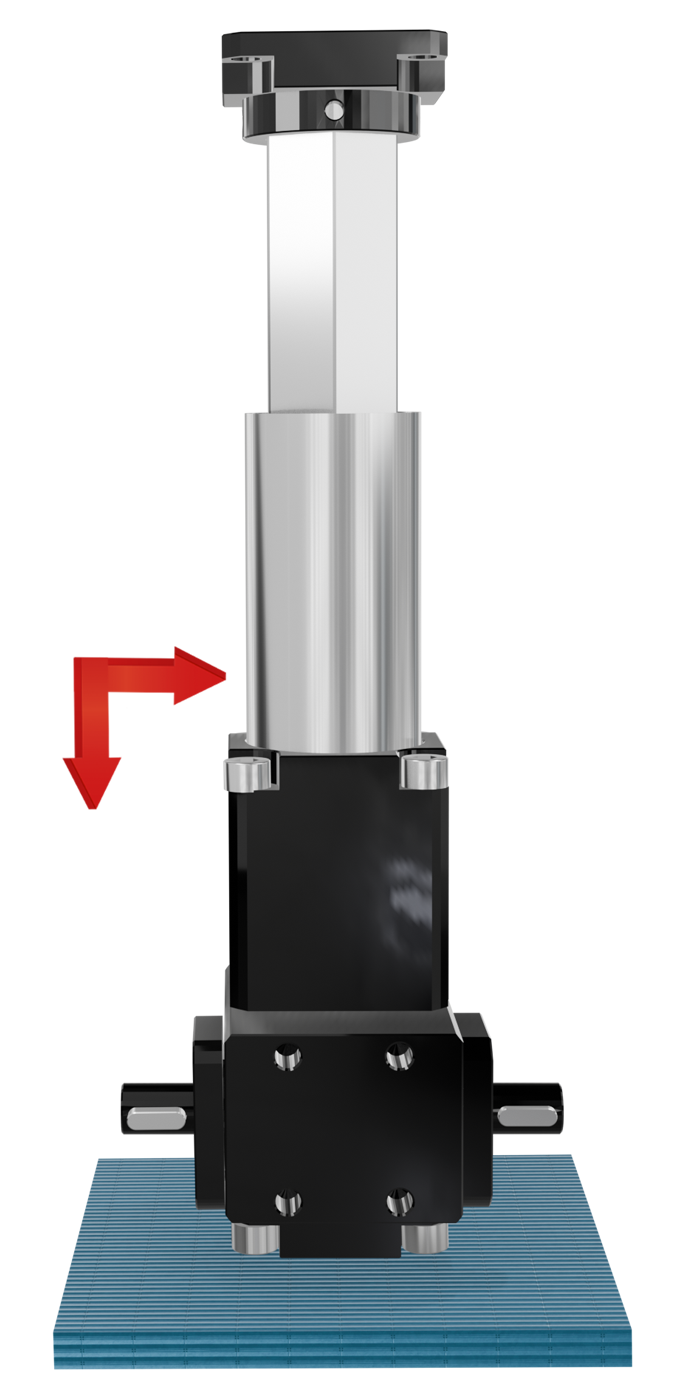
| Support inférieur |
Support latéral |
 |
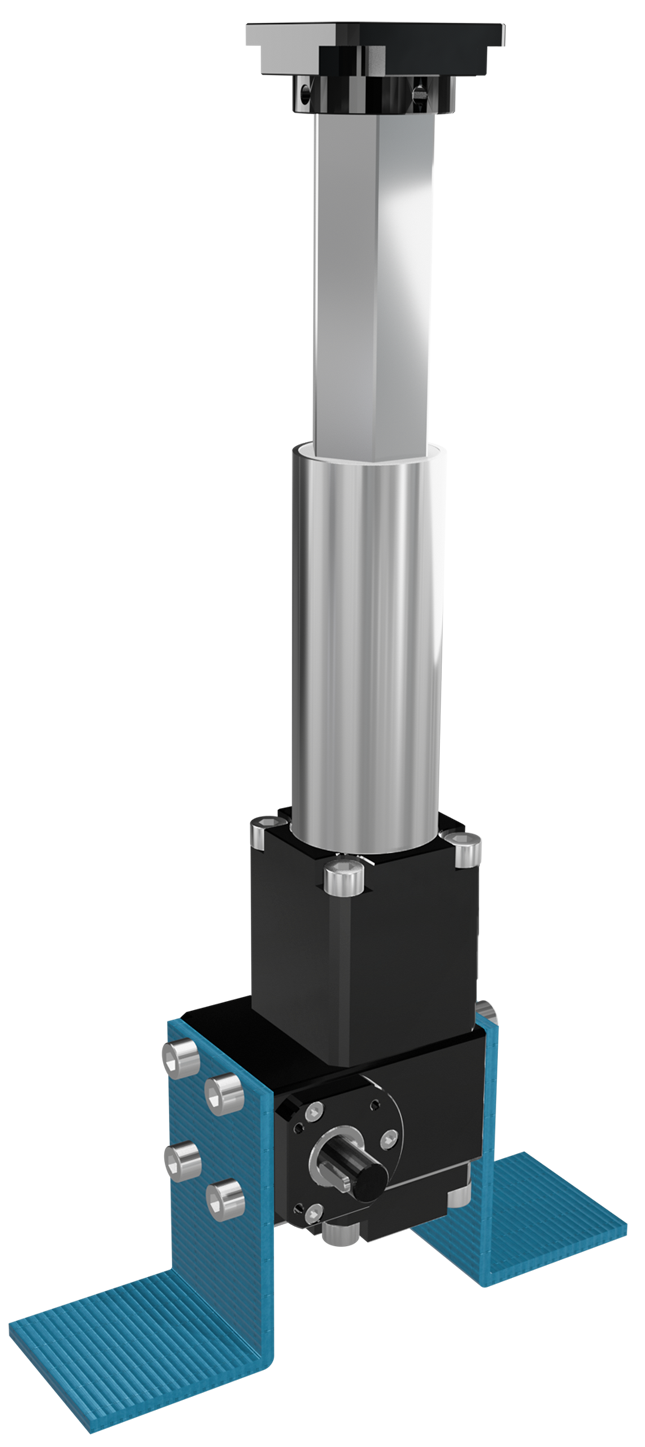 |
| Plaque/équerre sous le carter pour un montage optimal | Support latéral permet une charge maximale de 500 kg |
|
INSTALLAZIONE |
||
 |
 |
|
|
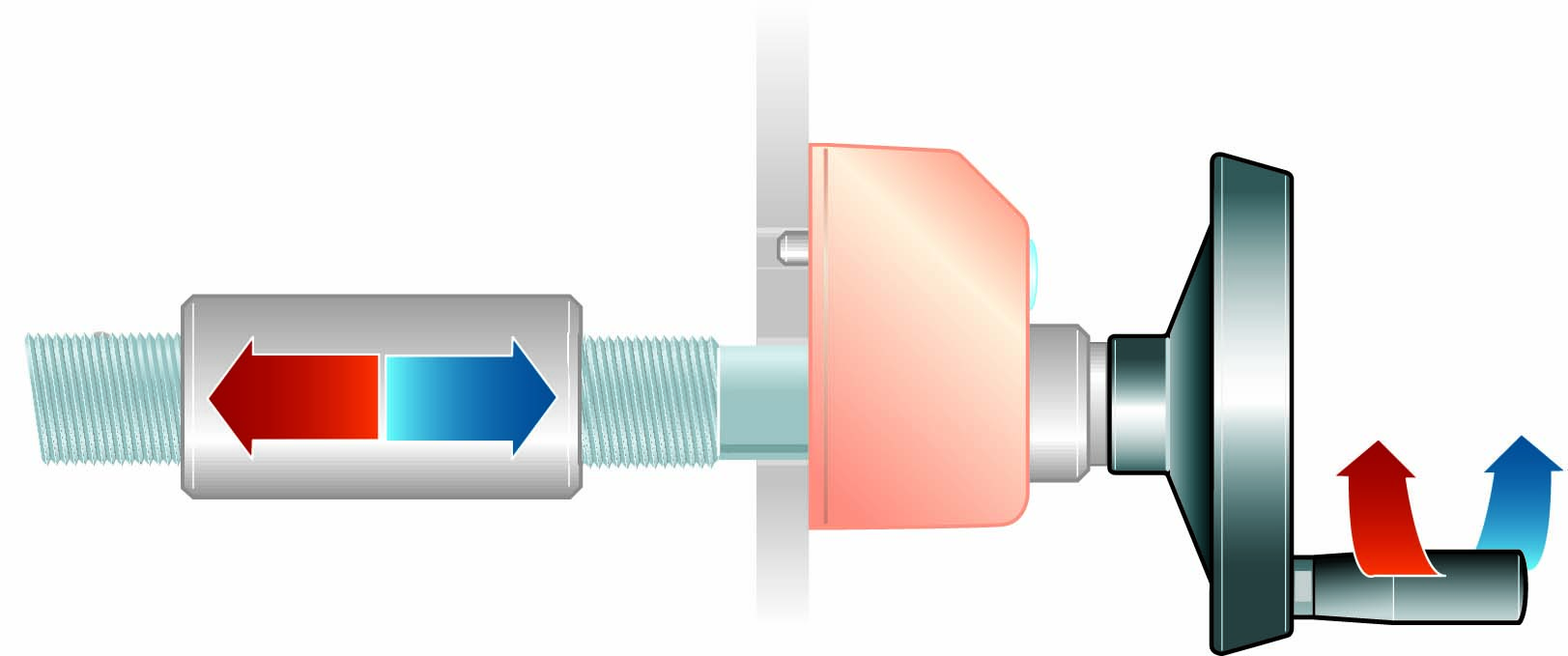
Éviter les charges radiales/latérales sur la vis trapézoïdale, principale cause de pannes |
Tige filetée et plan du réducteur orthogonaux; vérifier l’alignement axial charge/tige en évitant toute excentricité |
|
 |
||
|
Plusieurs vérins reliés: terminaux alignés pour une répartition uniforme de la charge ; utiliser des joints pour compenser les désalignements |
||
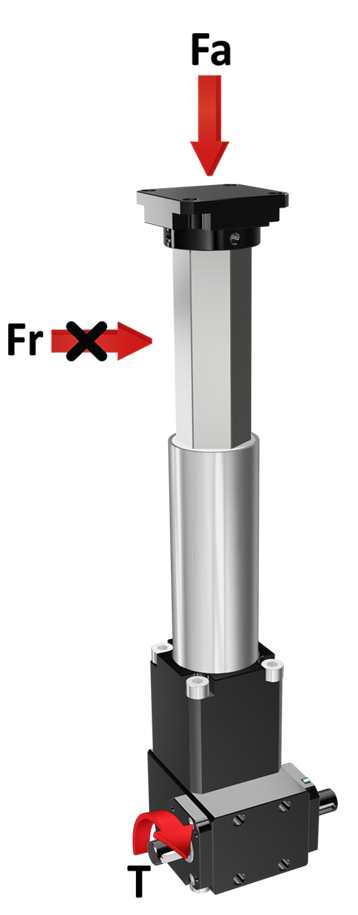
| REPRÉSENTATION DES CHARGES |
| Les charges agissant sur les arbres, par rapport à l’axe de l’arbre, peuvent être radiales (Fr) ou axiales (Fa).
Fr = force/charge radiale, agissant perpendiculairement à l’axe de l’arbre Remarque : les valeurs maximales admissibles de Fr, Fa et T dépendent du modèle et des conditions de fonctionnement. |
|
Compression |
|
|
| CALCUL DE LA DURÉE DE RENVOI | |
|
Calcul applicable à tous les modèles présents dans le catalogue |
| THÉORIQUE DURÉE PREVUE✽ = 10.000H X Fu COUPLE RECOMMANDÉ (Nm) Fu = -------------------------------------- Ta COUPLE APPLIQUÉE (Nm) |
✽ La durée de 10.000h est destiné aux conditions suivantes opération:
● Couple appliqué au couple recommandé (voir les tableaux)
● Maximum de 8 heures par jour
● Température de fonctionnement 20°
● Pas d'impact
● Ta Couple de sortie effectivement appliqué
● Couple max appliquée (voir les tableaux/modèles)
| GLOSSAIRE |
| FR = force radiale |
| FA = force axiale |
| R = rendement |
| T = couple transmissible |
| Tm = couple maximum |
| Tr = couple conseillé |
| Ta = couple appliqué |
| To = couple en sortie |
| Ti = couple en entrée |
| Pn = puissance |
| N = Newton |
| Nm = Newton meter |
| fu = facteur d'utilisation |
| i = rapport de transmission |
| rpm = tours par minute (1/min) |
| n1 = arbre en entrée |
| n2 = arbre en sortie |
| M = arbre de sortie saillant/mâle |
| F = arbre de sortie creux borgne/femelle |
| F = arbre de sortie creux borgne/femelle |
| ⦿ Pour un dimensionnement correct, il est nécessaire de connaître: puissance transmise (Pn), moment de torsion en sortie (T) et vitesse de rotation en entrée (rpm). |
| ⦿ Pour définir le renvoi/réducteur le plus adapté aux besoins, vérifier les valeurs reportées dans le tableau pour chaque modèle. Contacter le bureau technique dès lors que les charges et les rendements réels seraient très proches des valeurs du tableau. |
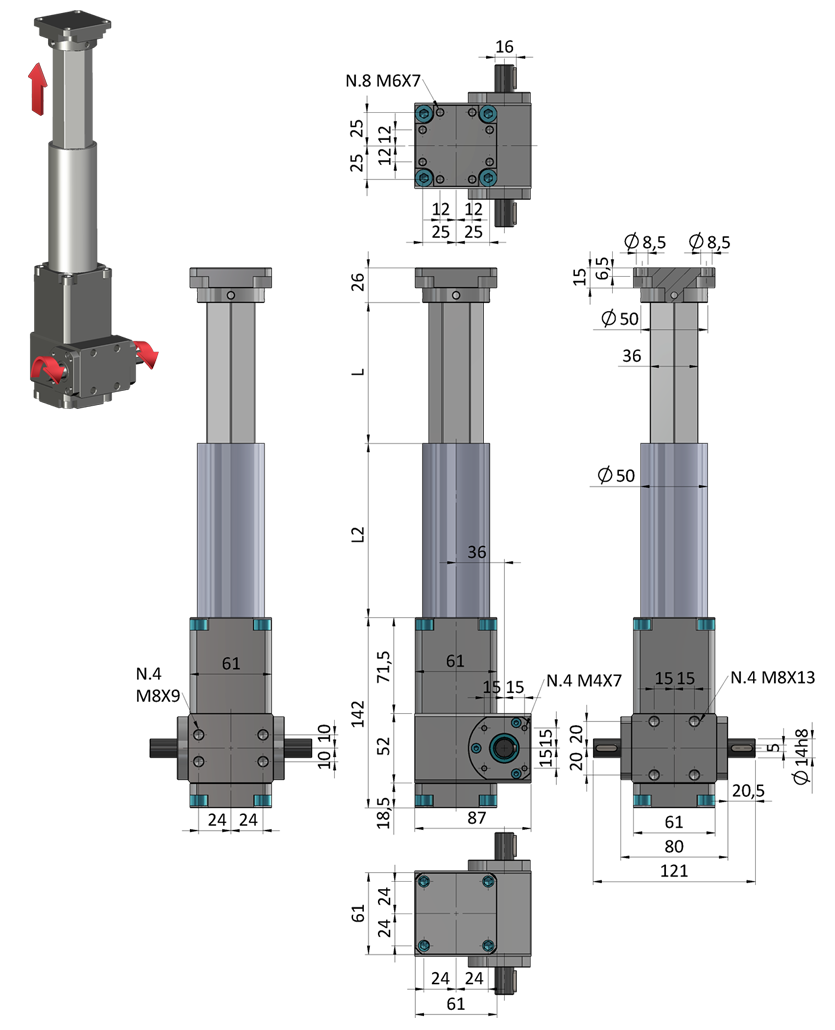
| ⦿ Sauf indication contraire, tous les tableaux contenant les dimensions présentent des mesures linéaires exprimées en ‹mm›. Tous les rapports de réduction sont exprimés sous forme de fraction, sauf indication contraire. Toutes les forces sont indiquées en N, les charges en kg, les couples en Nm et les rendements en %, sauf indication contraire. |









Volant de manœuvre avec poignée pliant, matériel thermoplastique, bague en acier.
➜ Pour des informations plus complètes, voir V.R

Manivelle avec poignée pliant, matériel thermoplastique, bague en acier.
➜ Pour des informations plus complètes, voir V.M

Supports avec bridE avec l'arbre d'extension pour relier des indicateurs de position.
➜ Pour des informations plus complètes, voir Supports avec bride

Les joints universels articulés «GC» et «GCC» utilisés pour la transmission du couple et du mouvement des éléments non alignés.
Caractéristiques principales: application universelle, haute fiabilité, pas d’entretien, facilité d’utilisation, extrêmement précis.
• Corps en acier inoxydable AISI303, entièrement usiné dans le solide.
• Adaptées aux mouvements intermittents (UI) et continus (UC).
• Angle de travail max. 45 °.
➜ Pour des informations plus complètes, voir GC e GCC

• Les arbres télescopiques sont idéales pour relier deux éléments avec des entraxes fixes ou variables.
• Adapté aux réglages et à une utilisation continue.
• Couples de 5 Nm à 10 Nm.
➜ Pour des informations plus complètes, voir ATE

• Les arbres télescopiques sont idéales pour relier deux éléments avec des entraxes fixes ou variables.
• Adapté aux réglages et à une utilisation continue.
• Couples de 25 Nm à 50 Nm.
➜ Pour des informations plus complètes, voir ATS

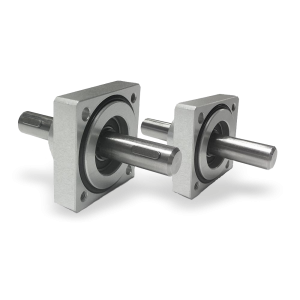
Les arbres rigides AR sont utilisés pour la liaison entre deux arbres parfaitement alignés et ne présentant pas de désalignements.
Les principales caractéristiques sont une application universelle et une haute fiabilité.
• Convient aux entraînements manuels et motorisés.
• Simples et rapides à monter, ils ne nécessitent pas de supports supplémentaires.
➜ Pour des informations plus complètes, voir AR






• Compteur à 5 chiffres (chiffre rouge pour indiquer les dixièmes; sur demande 2 chiffres rouges pour les centièmes ou 5 chiffres noirs pour les mm).
• Lecture jusqu’à 99999. Hauteur des chiffres mm 7.
• Trou standard ø20 (OP7) ou ø25 (OP7F25), autres plus petits avec douille de réduction.
➜ Pour des informations plus complètes, voir OP7

• Utilisé pour la mesure de déplacements linéaires ou angulaires compact
• Montage simple à travers l’arbre creux
• Alimentation par batterie
➜ Pour des informations plus complètes, voir EP7

Renvoi d’angle 66/5 avec bride MØ14x68 FL-OP3/EP3 et MØ14x80 FL-OP7/EP7, conçu pour la connexion avec l’indicateur de position. Il garantit des réglages précis et un suivi exact de la position, améliorant la stabilité et la précision des mesures. La bride, réalisée en aluminium anodisé noir, s’harmonise parfaitement avec le corps du renvoi, tous deux dotés de la même finition élégante et durable.
➜ Pour des informations plus complètes, voir 66/5

● Actionnement et positionnement automatique des axes, dans un seul dispositif
● Design ultra-compact, montage simple avec arbre creux Ø 14 avec clavette 5 mm baissée.
● Interfaces de sortie : Profinet, EthernetIP, PowerLink, EtherCat.
➜ Pour des informations plus complètes, voir SERVO.ALL

L’unité Servo-OP est un actionneur électrique rotatif qui associé à notre indicateur OP3 (optionnel), permet la visualisation de la position, directement au moyen de deux boutons.
• Structure en aluminium anodisé, dimension réduite
• Réducteur avec sortie à arbre creux
Pour des informations plus complètes, voir SERVO.OP
Galerie Photo






Richiedi l'accesso
|
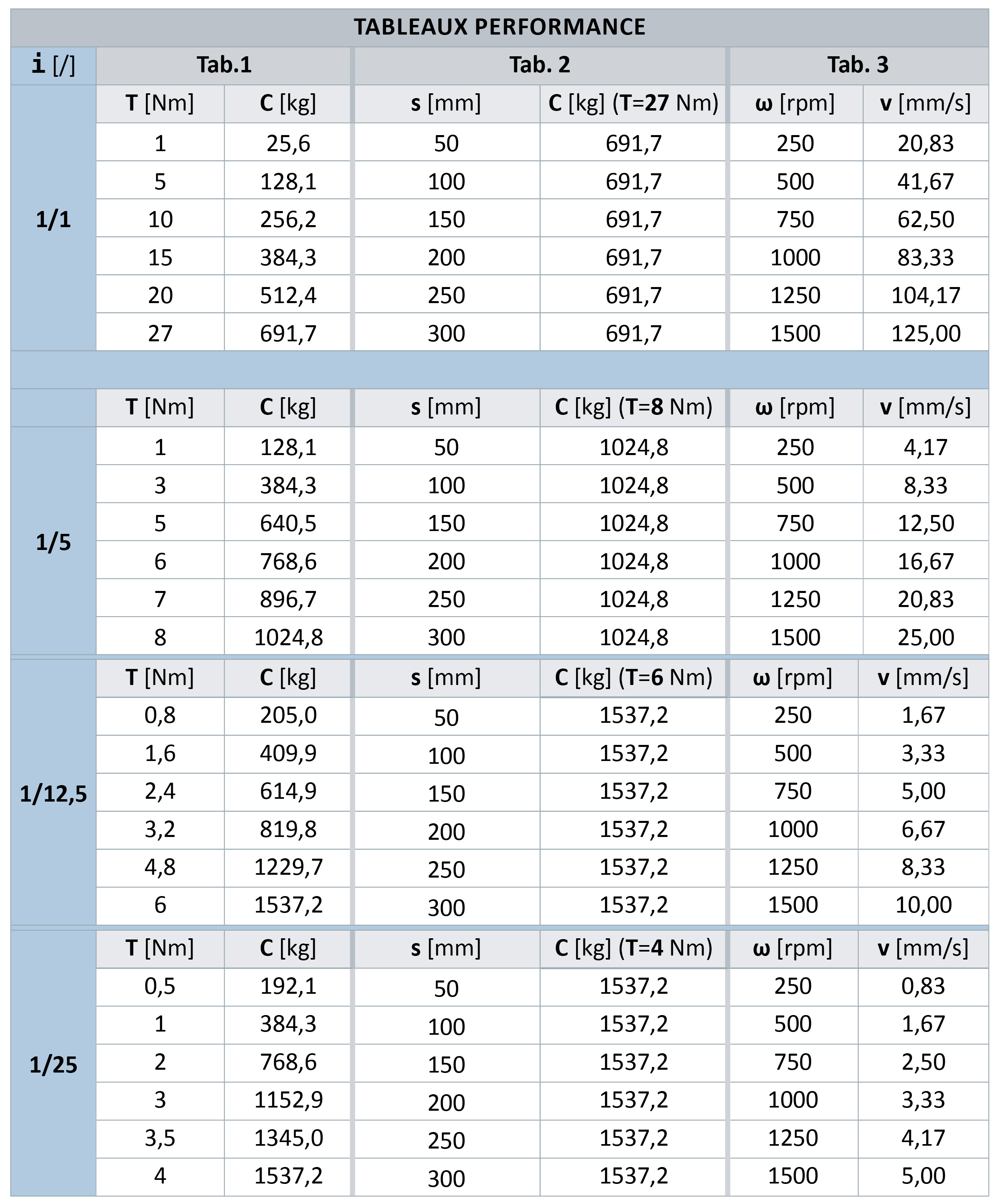
LEGENDE DES TABLEAUX PERFORMANCE |
||
|
Tab. 1 |
= |
charge déplacée en fonction du couple d'entrée |
|
Tab. 2 |
= |
charge déplacée en fonction de la course max de la vis (avec guides) |
|
Tab. 3 |
= |
vitesse de translation de la vis basée sur le no. tours d'entrée |
|
i |
= |
ratio de réduction [/] |
|
T |
= |
couple [Nm] |
|
C |
= |
charge déplacée [kg] |
|
s |
= |
course [mm] |
|
ω |
= |
vitesse de rotation [rpm] |
|
v |
= |
vitesse de translation [mm/s] |
MAR60G 

Cliquer ici pour télécharger
MAR60G 
Cliquer ici pour télécharger
MAR60G 

Cliquer ici pour télécharger