RD40
Reductores helicoidales 
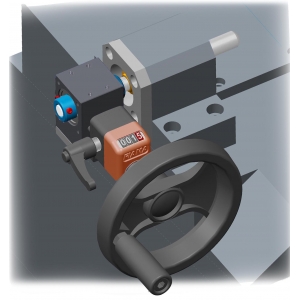
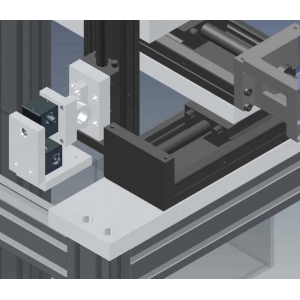
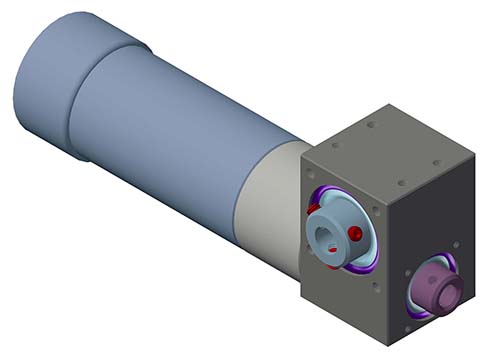
Compact reducer, high-performance, suitable for various industrial applications that require high yields.In particular for automation and robotics, applicable also to motors.
• Housing made of anodized aluminium
• Shafts and gears made of PR80 steel with surface hardening treatment, high wear and fatigue resistance plus friction reduction and significant increase in corrosion resistance
• Relaciones de reducción estándar: 1/1 - 1/2 - 1/4 - 1/7,5 - 1/10 - 1/15 - 1/20 - 1/30 - 1/40.
• Formas constructivas con ejes de entrada y salida sobresalientes y cable.
• Bridas para acoplamiento directo en la parte lateral de la máquina, motores y visualizadores con indicadores de posición.
• Versiones disponibles:
- RD40 reductor
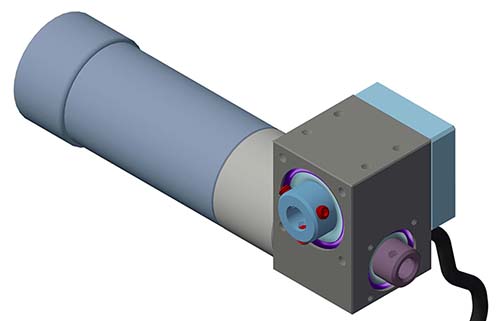
- RD40S con sensor magnetico
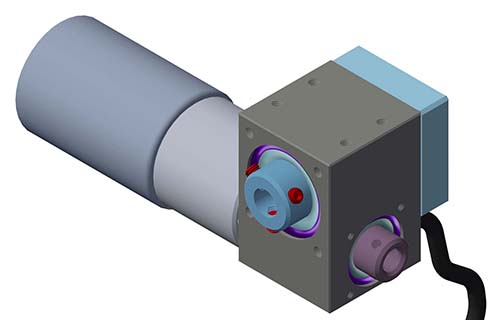
- RD40M con motor de imanes permanentes
- RD40MR con motor de engranajes
- RD40MS con motor de imanes permanentes y sensor mágnetico
- RD40MRS con motor de engranajes y el sensor magnético
➜ Para los datos del sensor y del motor, consulte la sección "Datos técnicos generales" en el menú desplegable de la derecha.
Galeria de fotos




|
EJEMPLOS DE APLICACIÓN |
 |
 |
 |
| RD40 |
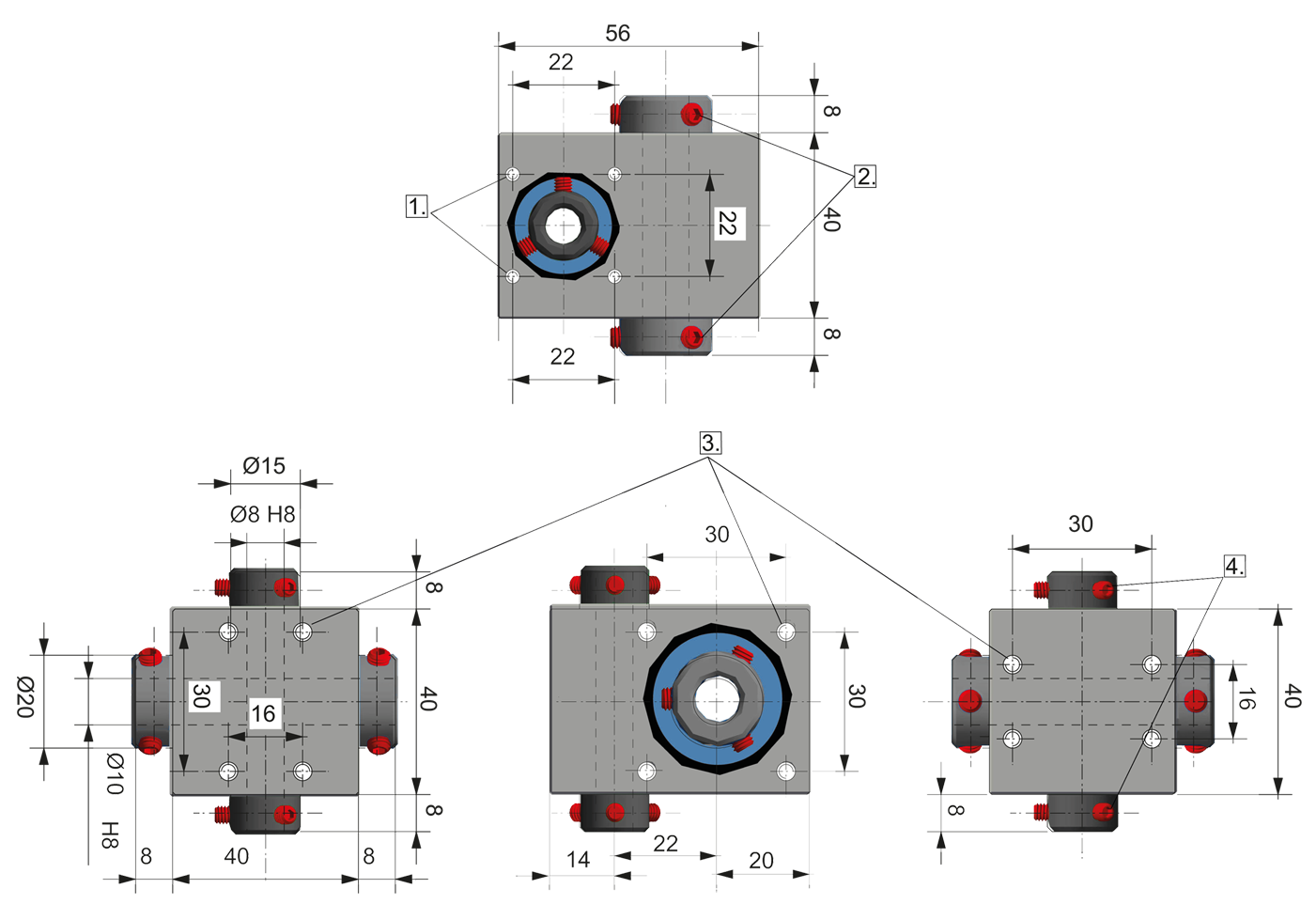 |
| 1. Roscado M4 2. Nr. 3 tornillos de fijación M4 a 120° 3. Roscado M3x7 4. Nr. 3 tornillos de fijación M5 a 120° |
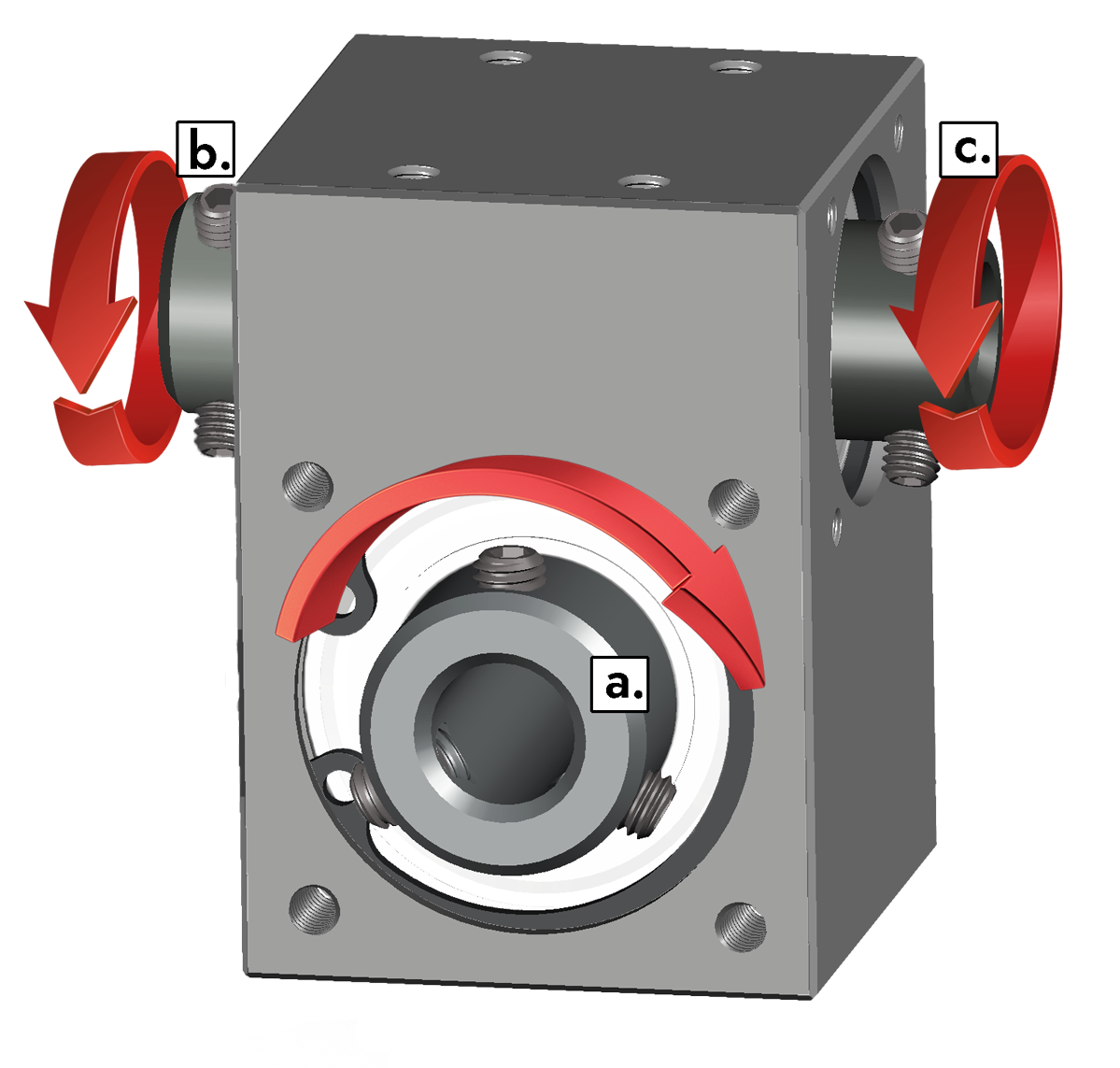 |
| a. Arbol de entrada rápido b. Arbol de salida lento c. Arbol de salida lento |
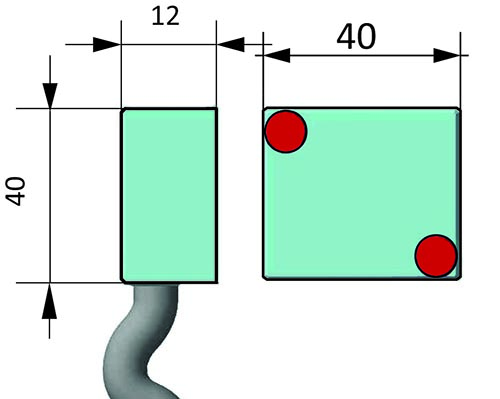
| ENCODER INKREMENTAL PARA RD40 | |
|
|
|
|
Dimensiones |
12 x 40 x 40 cm |
|
Alimentación |
10 ÷ 30 Vdc ±10%, max 60 mA |
|
Precisión |
256 imp/vuelta |
|
Señales de salida |
canales A - B (20mA) |
|
Grado de protección |
IP66 |
|
Contenedor |
aluminium anodizado |
|
Temperatura de trabajo |
-10 ÷ 70 °C |
|
Humedad de trabajo |
10 ÷90% |
|
Salida cable |
0,5 - 1 -2 -5 -10 metros |
|
EMC |
2004/108/CE |
|
El sensor convierte la rotación del eje de salida de reductores en pulsos |
|

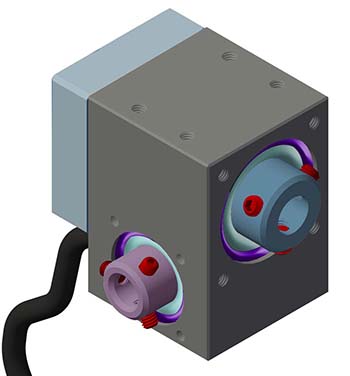
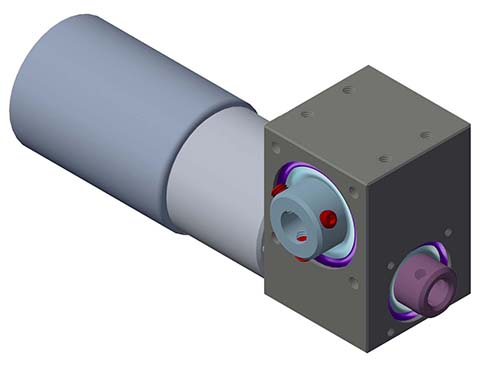
| MOTORES PARA RD40 | |
 |
 |
|
MOTORES "M" CON ACOPLAMIENTO PARA RD40 |
MOTOENGRANAJE "MR" CON ACOPLAMIENTO PARA RD40 | ||||||
| A | B | RPM | PAR (Nm) | A | B | RPM | PAR (Nm) |
| 35 | 56 | 2200 | 0,06 | 30 | 79 | 450 | 0,4 |
| 40 | 98 | 5600 | 0,2 | 42 | 113 | 420 | 0,7 |
| 35 | 65 | 11000 | 0,05 | ||||
|
➜ adecuado para movimientos alternos |
➜ adecuado para movimiento continuo |
||||||
| VERSIONES DISPONIBLES | |
| RD40 reductor | RD40S con sensor |
 |
 |
| RD40M con motor | RD40MR con motoengranaje | |
 |
 |
|
| RD40MS con motor y sensor | RD40MRS con motoengranaje y sensor | |
 |
 |
|


Las juntas universales articuladas «GC» y «GCC» se utilizan para la transmisión de par y movimiento de elementos no alineados.
Características principales: aplicación universal, alta fiabilidad, sin mantenimiento, facilidad de uso, extrema precisión.
• Cuerpo en acero inoxidable AISI303, totalmente mecanizado en macizo.
• Apto para movimientos intermitentes (UI) y continuos (UC).
• Ángulo de trabajo máx. 45 °.
Richiedi l'accesso
| CARACTERISTICAS TECNICAS | |
| FR-I = cargamento radial de entrada | 100 N |
| FR-O = cargamento radial de salida | 1000 N |
| Jueco máximo | 0,75° |
| Máx rpm de entrada (1/min) | 5.000 |
| Temperatura de trabajo | -20 +90° |
| Duración | 10.000 h |
| Peso | 360 gr |
| Lubricación con grasa | SANEG LX EP 2 |
| TABLA DE RENDIMIENTO | |||||||||
| i | 1/1 | 1/2 | 1/4 | 1/7,5 | 1/10 | 1/15 | 1/20 | 1/30 | 1/40 |
| R % | 0,73 | 0,71 | 0,67 | 0,66 | 0,44✽ | 0,34✽ | 0,44✽ | 0,21✽ | 0,29✽ |
|
TI Nm |
8,26 | 4,20 | 2,24 | 1,21 | 1,38 | 1,16 | 0,68 | 0,95 | 0,52 |
| TO Nm | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
✽ irreversibilidad
| Símbolos: |
| i = relación de transmisión |
| R = eficiencia |
| TI = par de entrada |
| TO = par de salida |
➜ Para utilizar en continuo recomendamos contactar el departamento técnico: se inserta un engrasador, en intervalos variables de tiempo, dependiendo de las condiciones de trabajo, es necesario restaurar la cantidad correcta de lubricante.
⁃ Para la identificación del reductor mas apropiado a las propias necesidades, comprobar los valores escritos en la tabla para cada modelo, en el caso las cargas y los rendimientos reales sean muy cerca de los valores de la tabla contactar el departamento técnico.
⁃ Todas las tablas dimensionales traen medidas lineales expresadas en ‹mm›, a menos que no sea especificado de otra manera.
⁃ Todas las relaciones de reducción son bajo forma de ‹fracción› a menos que no sea especificado de otra manera.
⁃ Todas las fuerzas, los rendimientos y las cargas son expresadas en ‹Nm› (10 Nm = 1Kg) a menos que no sea especificado de otra manera.




