RD26
Reductores helicoidales
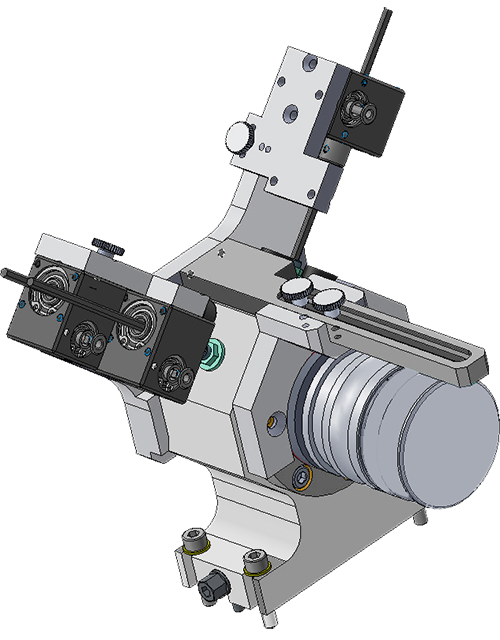
Se trata de reductores extremadamente pequeños, realizados por lo general, para aplicaciones industriales, sobre todo, para la automación y la robótica donde se utilizan, incluso, en los motores.
• Cuerpo de aluminio anodizado negro, monobloque, ejes de acero PR80 con tratamiento de superficie endurecimiento (con elevada resistencia al desgaste y a la fa- tiga, además de una reducción del roce y un notable aumento de la resistencia a la corrosión).
• Relaciones de reducción estándar: 1/1 - 1/2 - 1/3 - 1/4 - 1/5- 1/7,5 - 1/10 - 1/15 - 1/25 - 1/30.
• Formas constructivas con ejes de entrada y salida sobresalientes y cable.
• Bridas para acoplamiento directo en la parte lateral de la máquina, motores y visualizadores con indicadores de posición.
• Versiones disponibles:
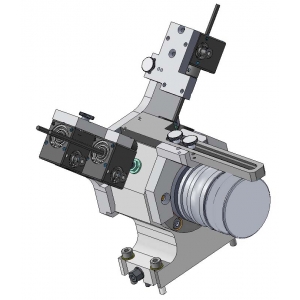
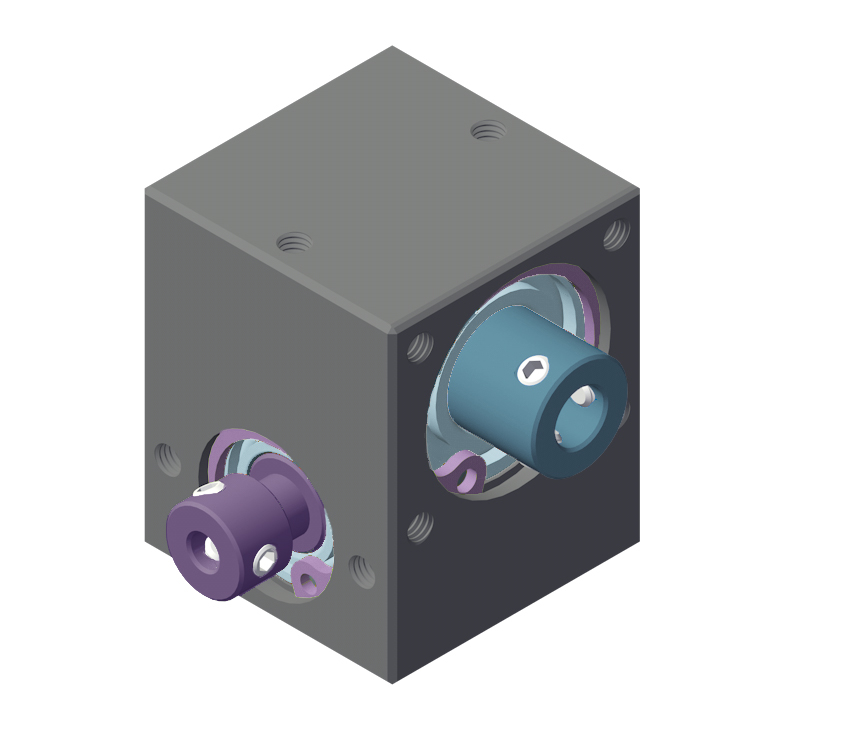
- RD26 reductor
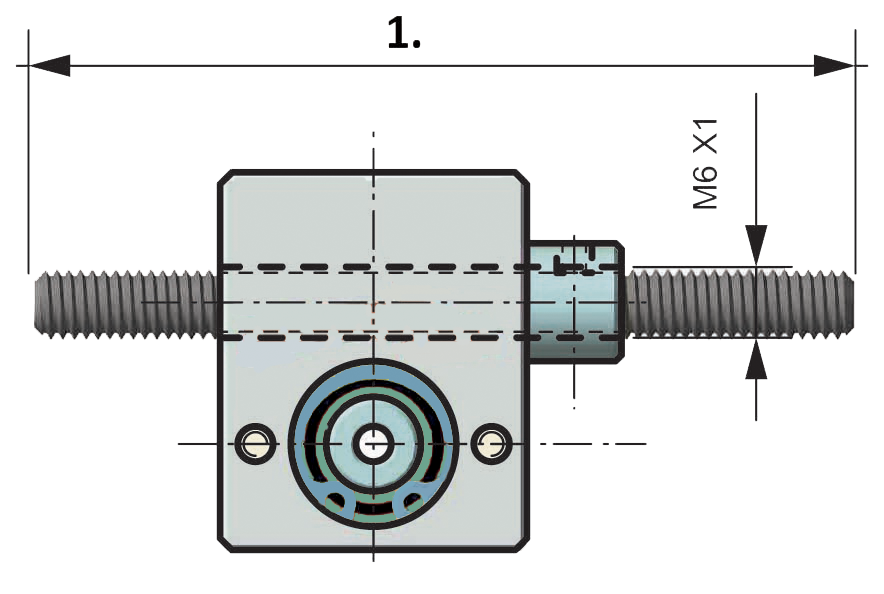
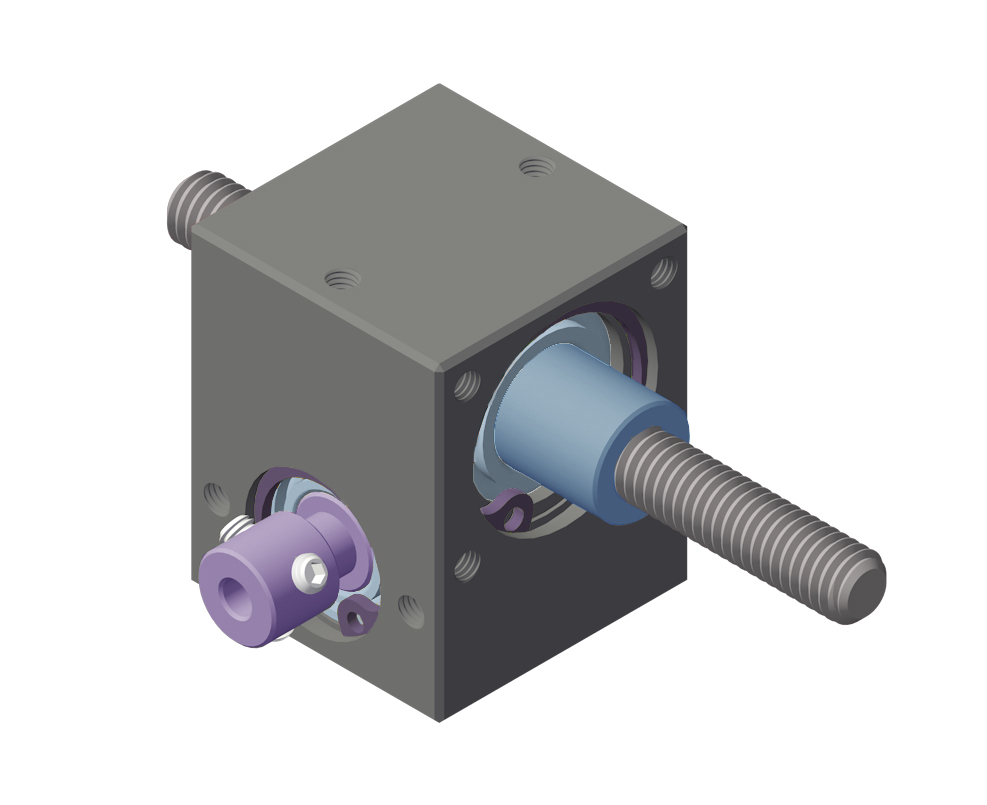
- RD26F para varilla roscada (varilla no suministrada)
- RD26S con sensor magnetico
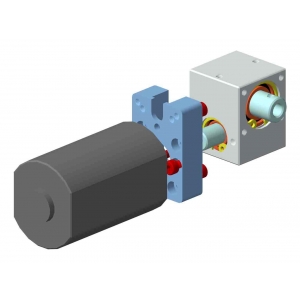
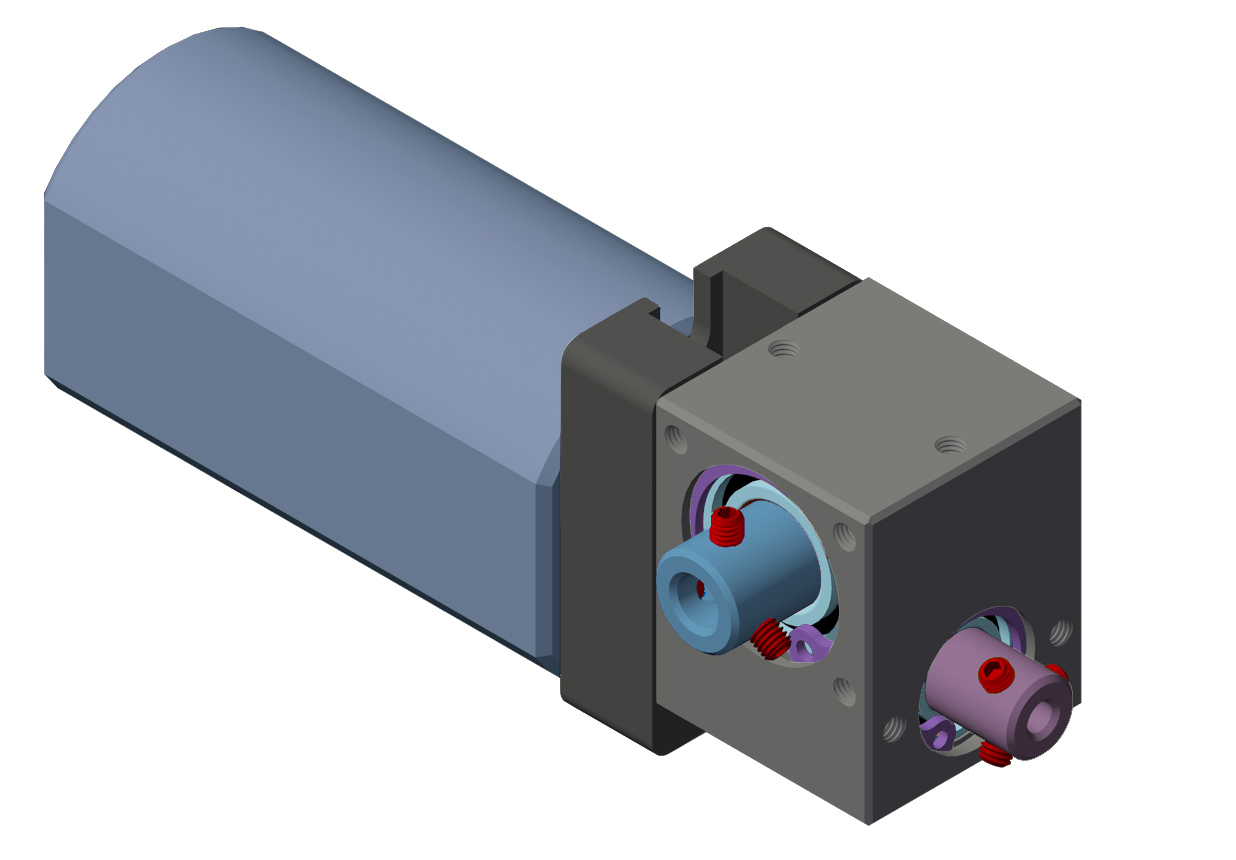
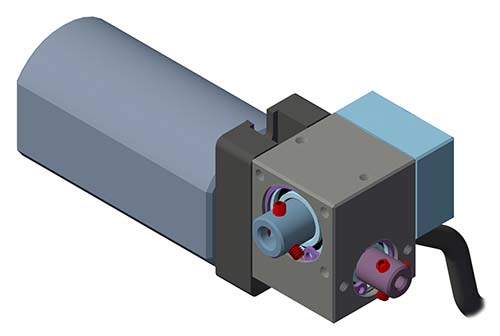
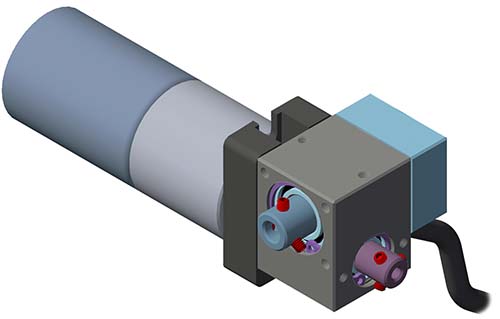
- RD26M con motor de imanes permanentes
- RD26MR con motor de engranajes
- RD26MS con motor de imanes permanentes y sensor mágnetico
- RD26MRS con motor de engranajes y el sensor magnético
➜ Para los datos del sensor y del motor, consulte la sección "Datos técnicos generales" en el menú desplegable de la derecha.
Galeria de fotos





|
EJEMPLOS DE APLICACIÓN |
 |
 |
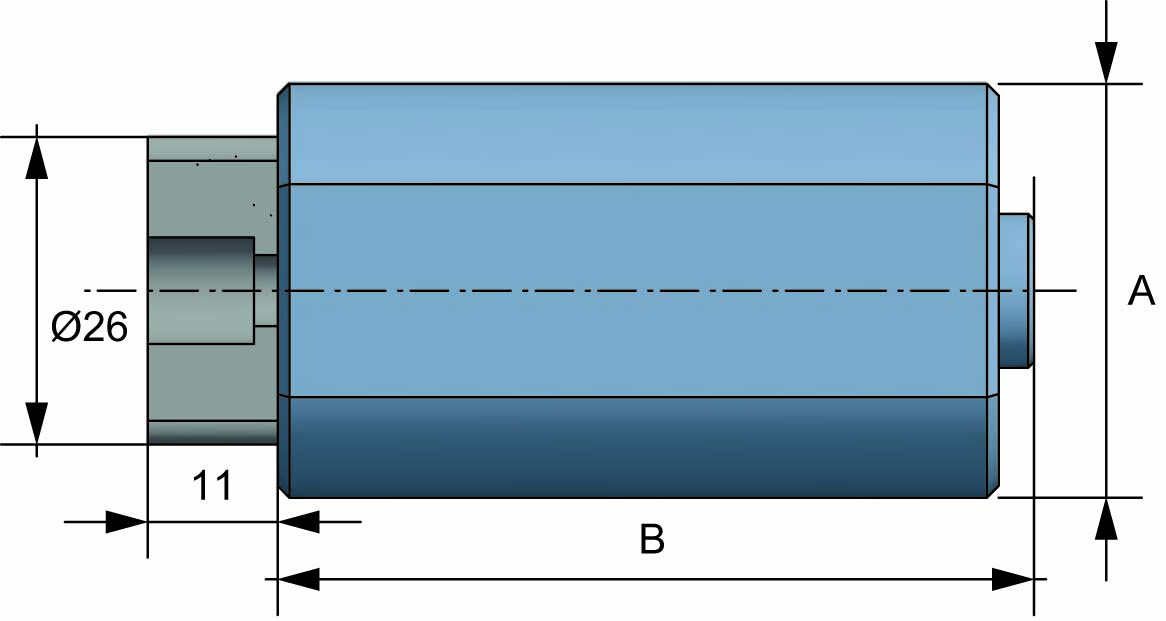
| RD26 |
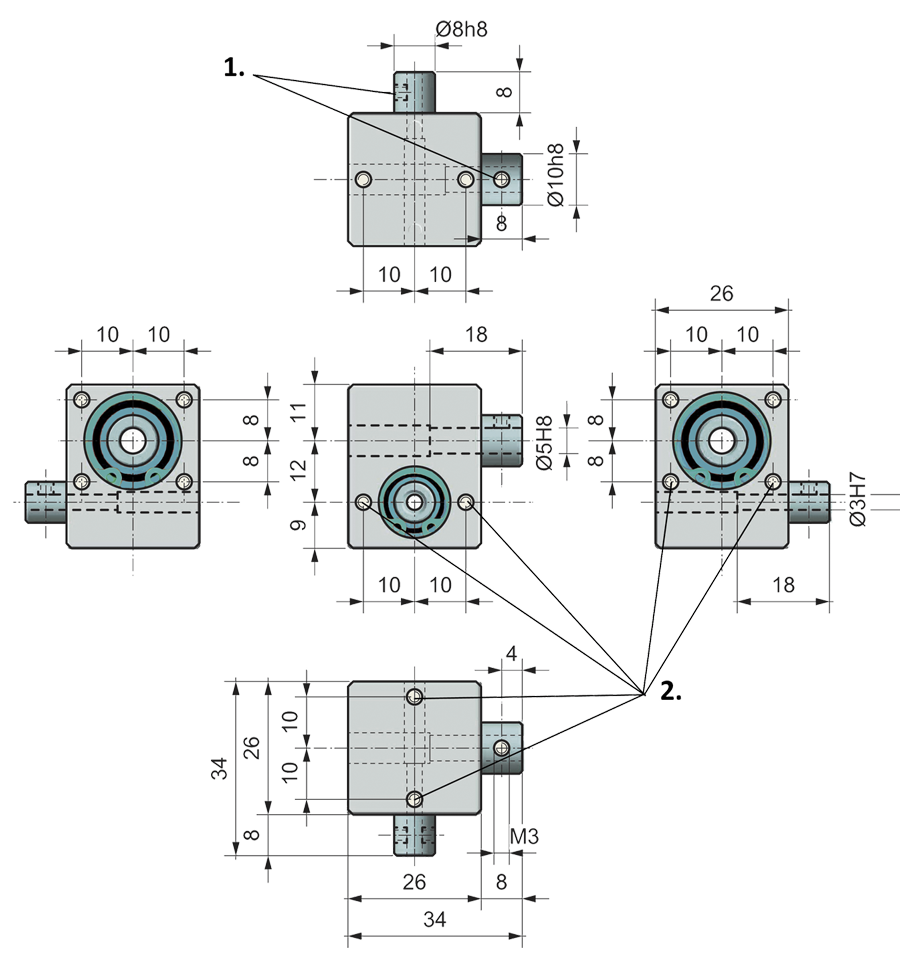 |
| 1. N° 3 tornillos de fijación eje M3 a 120° 2. Roscado M3x6 |
| RD26F para VARILLA ROSCADA (varilla no suministrada) |
 |
|
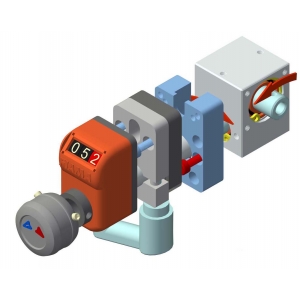
ENCODER INCREMENTAL PARA RD26 |
|
|
|
|
|
Dimensiones |
12 x 26 x 26 cm |
|
Alimentación |
10 ÷ 30 Vdc ±10%, max 60 mA |
|
Precisión |
256 imp/vuelta |
|
Señales de salida |
canales A - B (20mA) |
|
Grado de protección |
IP66 |
|
Contenedor |
aluminio anodizado |
|
Temperatura de trabajo |
-10 ÷ 70 °C |
|
Humedad de trabajo |
10 ÷90% |
|
Salida cable |
0,5 - 1 -2 -5 -10 metros |
|
EMC |
2004/108/CE |
|
El sensor convierte la rotación del eje de salida de reductores en pulsos |
|

| MOTORES PARA RD26 | |
 |
 |
|
MOTORES "M" CON ACOPLAMIENTO PARA RD26 |
MOTOENGRANAJE "MR" CON ACOPLAMIENTO PARA RD26 | ||||||
| A | B | RPM | PAR (Nm) | A | B | RPM | PAR (Nm) |
| 35 | 56 | 2200 | 0,06 | 30 | 79 | 450 | 0,4 |
| 35 | 65 | 11000 | 0,05 | ||||
|
➜ adecuado para movimientos alternos |
➜ adecuado para movimiento continuo |
||||||
| VERSIONES DISPONIBLES | ||
| RD26 reductor | RD26F para varilla roscada | RD26S con sensor |
 |
 |
 |
| RD26M con motor | RD26MR con motoengranaje | |
 |
 |
|
| RD26MS con motor y sensor | RD26MRS con motoengranaje y sensor | |
 |
 |
|
Richiedi l'accesso
| CARACTERISTICAS TECNICAS | |
| FR-I = cargamento radial de entrada | 20 N |
| FR-O = cargamento radial de salida | 200 N |
| Jueco máximo | 0,75° |
| Máx RPM de entrada | 5.000 |
| Temperatura de trabajo | -20 +90° |
| Duración | 10.000 H |
| Peso | 80 gr |
| Lubricación con grasa | SANEG LX EP 2 |
| TABLA DE RENDIMIENTO |
| i | 1/1 | 1/2 | 1/3 | 1/4 | 1/5 | 1/7,5 | 1/10 | 1/12,5 | 1/15 | 1/25 | 1/30 |
| R % | 0,72 | 0,72 | 0,69 | 0,63 | 0,60 | 0,61 | 0,55 | 0,39✽ | 0,45✽ | 0,25✽ | 0,30✽ |
|
TI Nm |
4,18 | 2,07 | 1,46 | 1,19 | 1 | 0,66 | 0,55 | 0,61 | 0,44 | 0,48 | 0,34 |
| TO Nm | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
✽ irreversibilidad
| Símbolos : |
| i = relación de transmisión |
| R = eficiencia |
| TI = par de entrada |
| TO = par de salida |
➜ Para utilizar en continuo recomendamos contactar el departamento técnico: se inserta un engrasador, en intervalos variables de tiempo, dependiendo de las condiciones de trabajo, es necesario restaurar la cantidad correcta de lubricante.
⁃ Para la identificación del reductor mas apropiado a las propias necesidades, comprobar los valores escritos en la tabla para cada modelo, en el caso las cargas y los rendimientos reales sean muy cerca de los valores de la tabla contactar el departamento técnico.
⁃ Todas las tablas dimensionales traen medidas lineales expresadas en ‹mm›, a menos que no sea especificado de otra manera.
⁃ Todas las relaciones de reducción son bajo forma de ‹fracción› a menos que no sea especificado de otra manera.
⁃ Todas las fuerzas, los rendimientos y las cargas son expresadas en ‹Nm› (10 Nm = 1Kg) a menos que no sea especificado de otra manera.




