MAR60
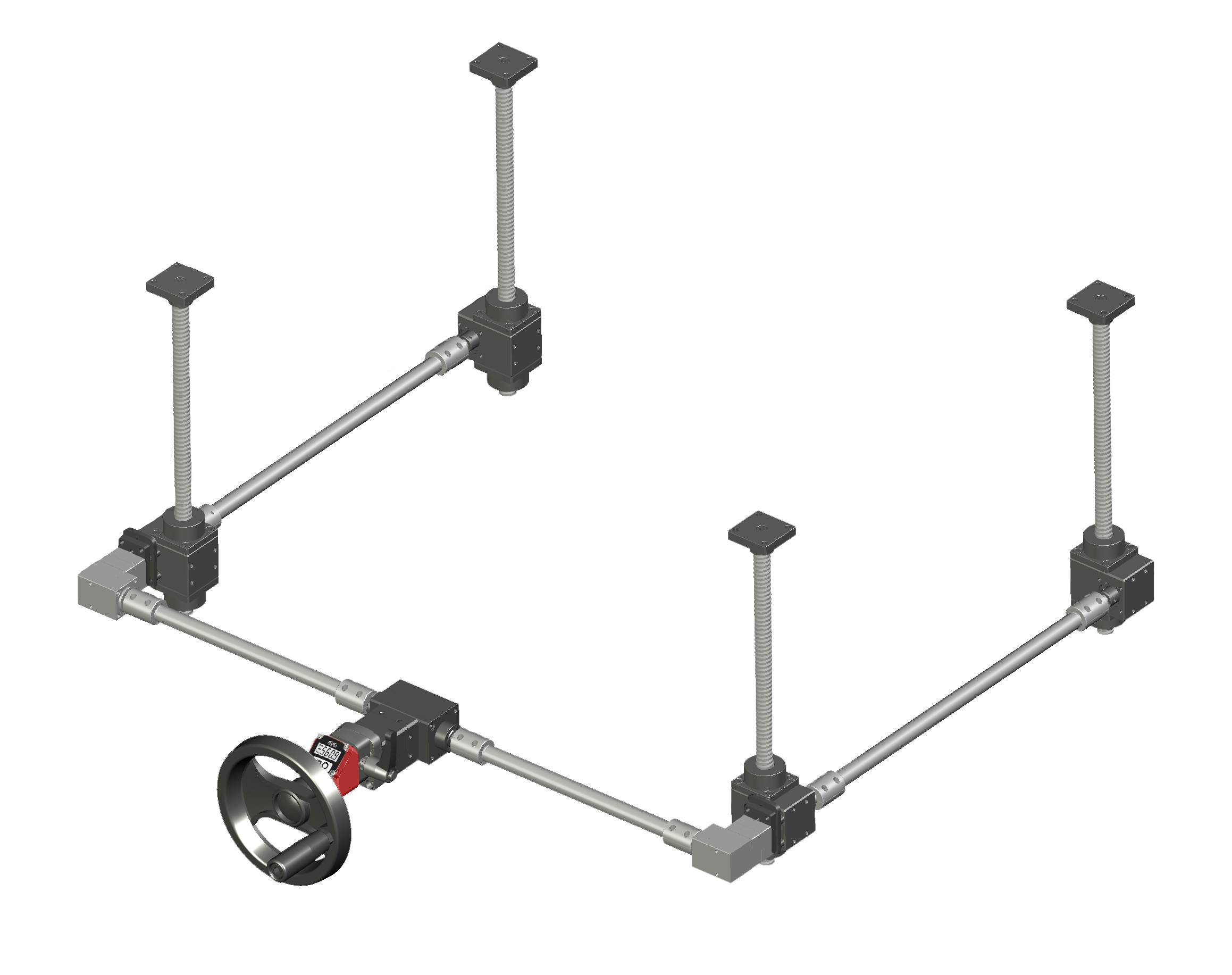
Gatos mecánicos a husillo carriles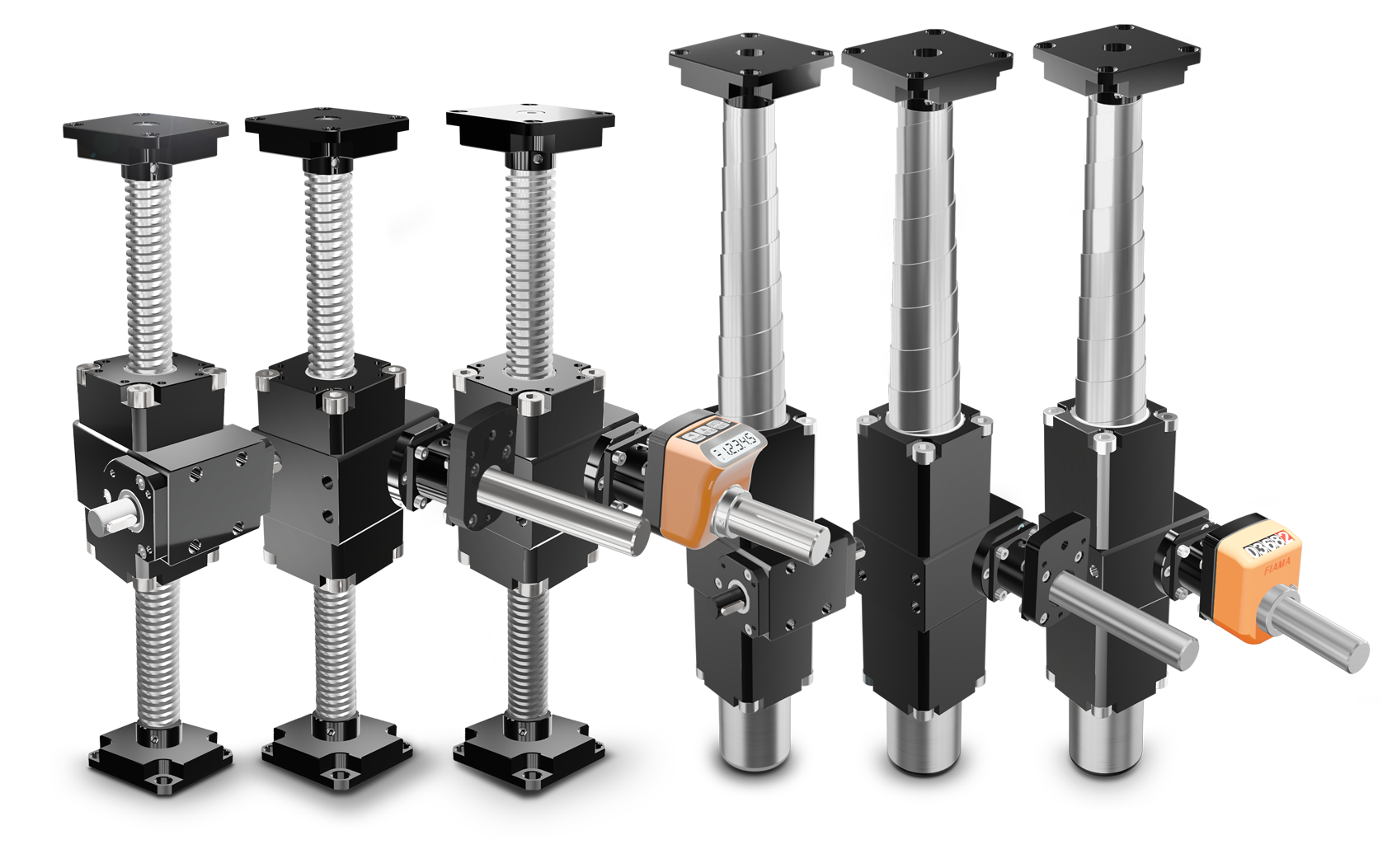
Gatos mecánicos – Precisos, Fiables, Modulares
• Transforman el movimiento rotativo en desplazamiento lineal preciso.
• Componentes de alta calidad y lubricación de larga duración para un funcionamiento regular y sin mantenimiento.
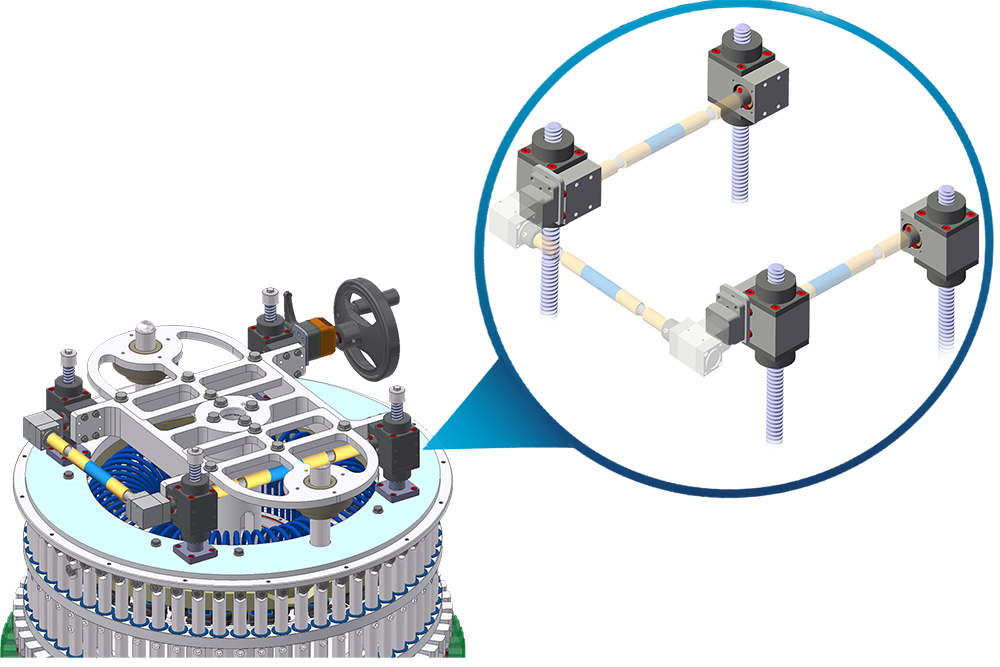
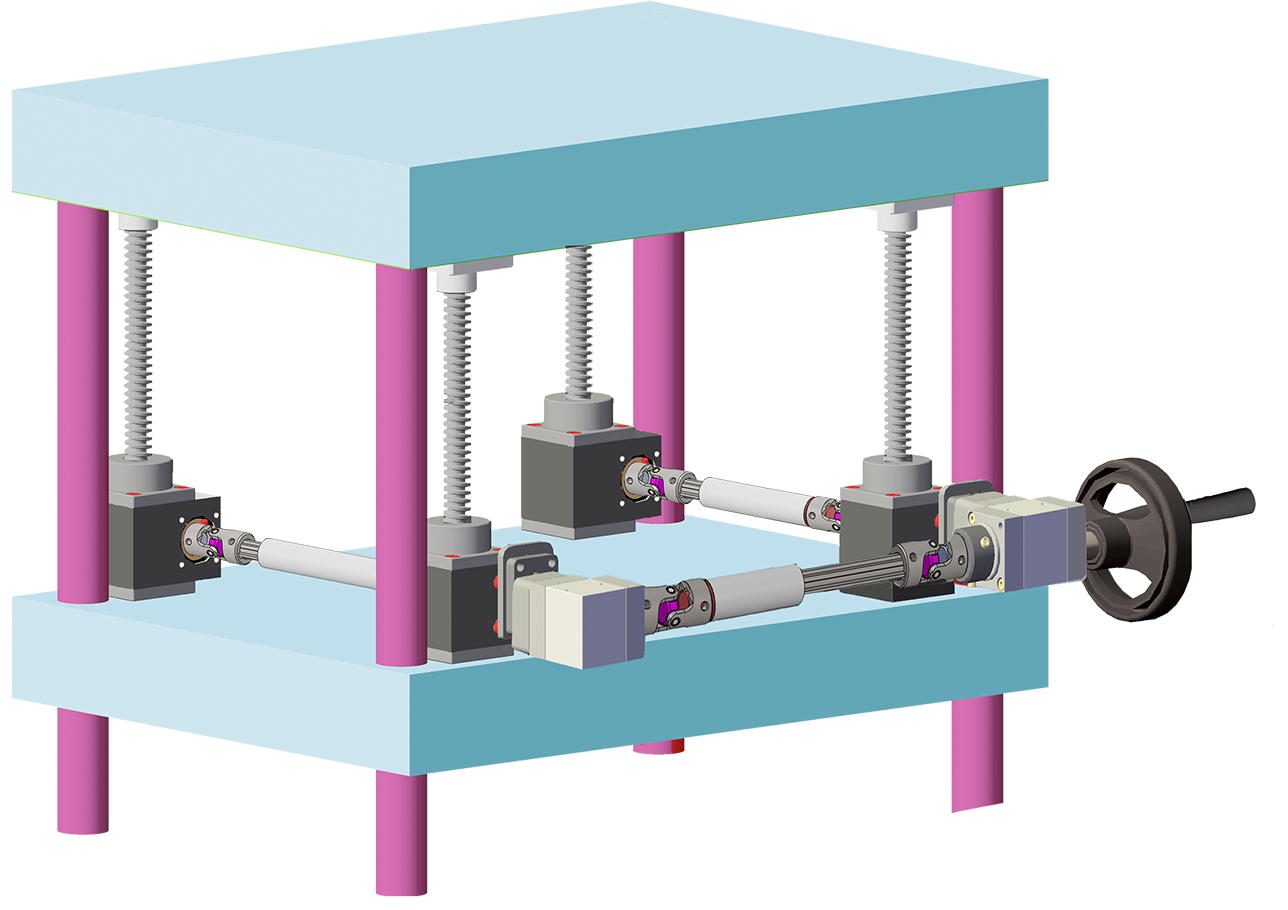
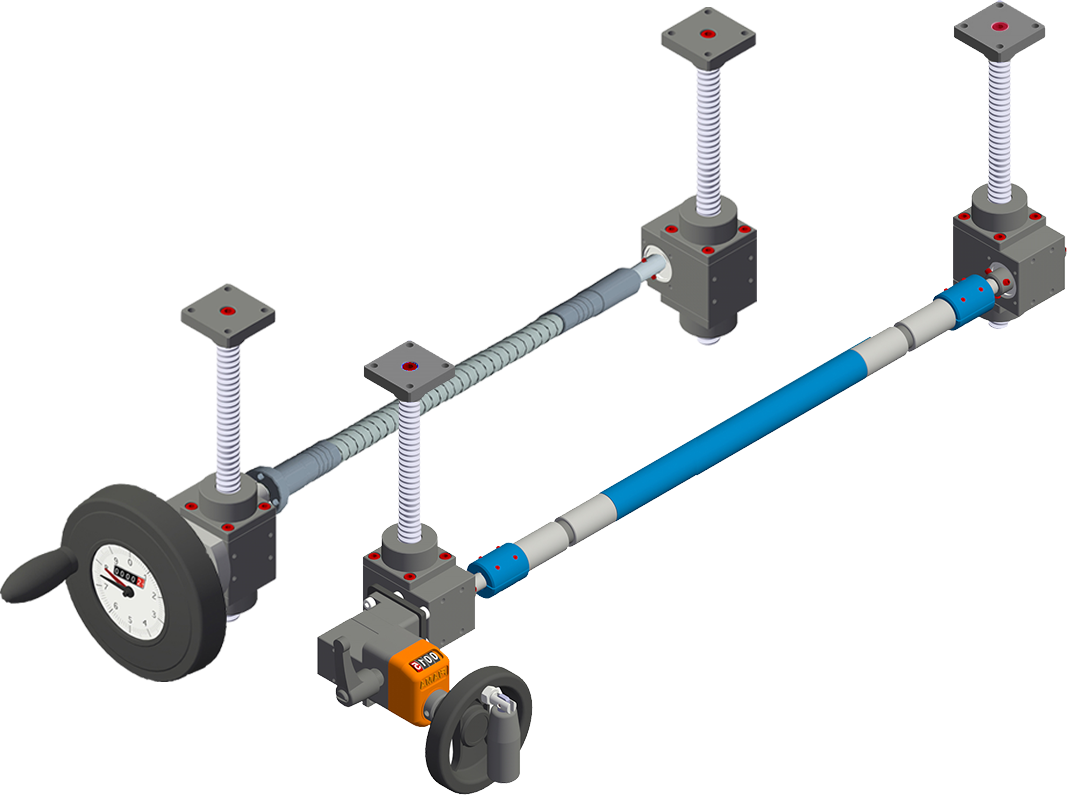
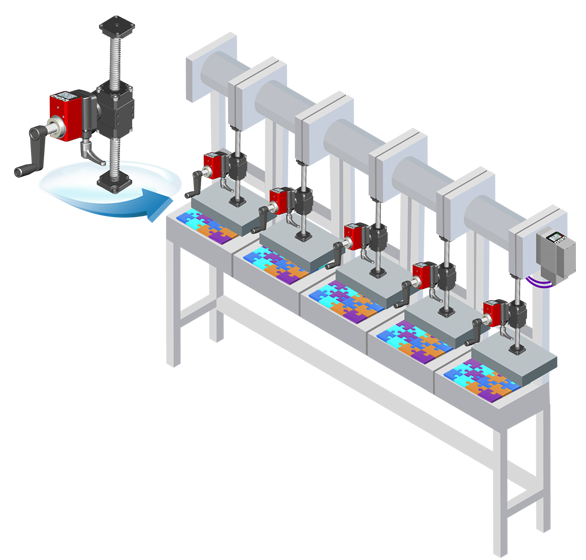
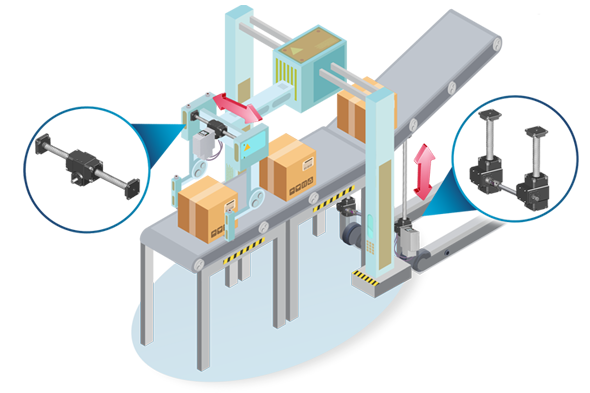
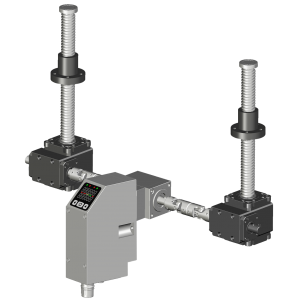
• Diseño modular para movimientos sincronizados y fácil integración en instalaciones.
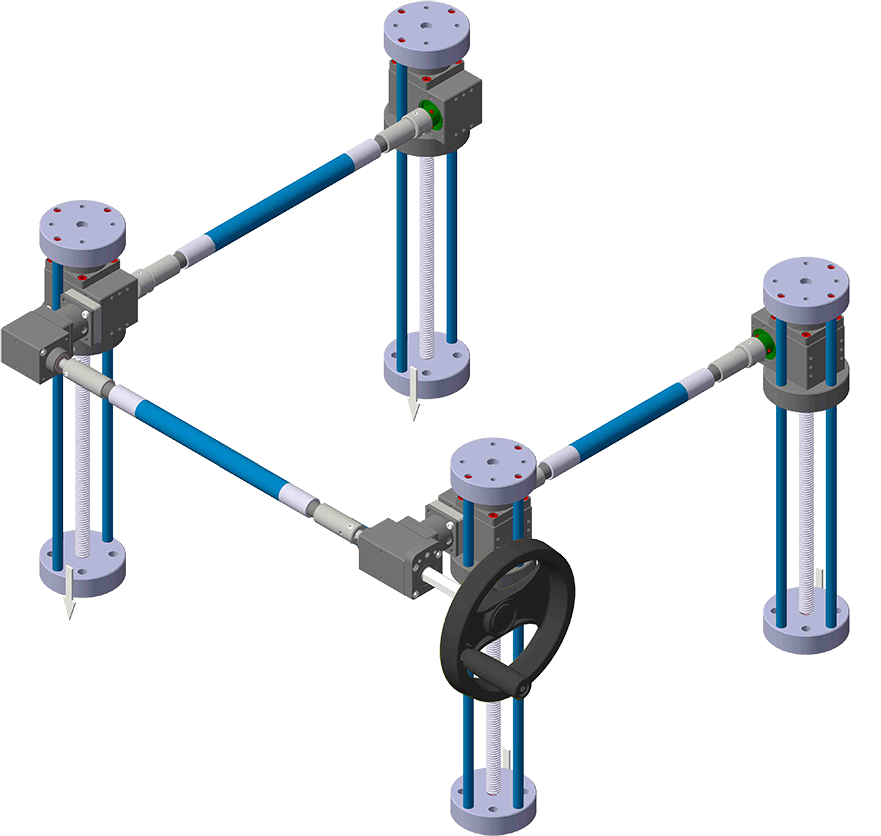
• Utilizables individualmente o en grupo mediante ejes, juntas y palieres angulares.
• Accionamiento manual o motorizado.
Características principales
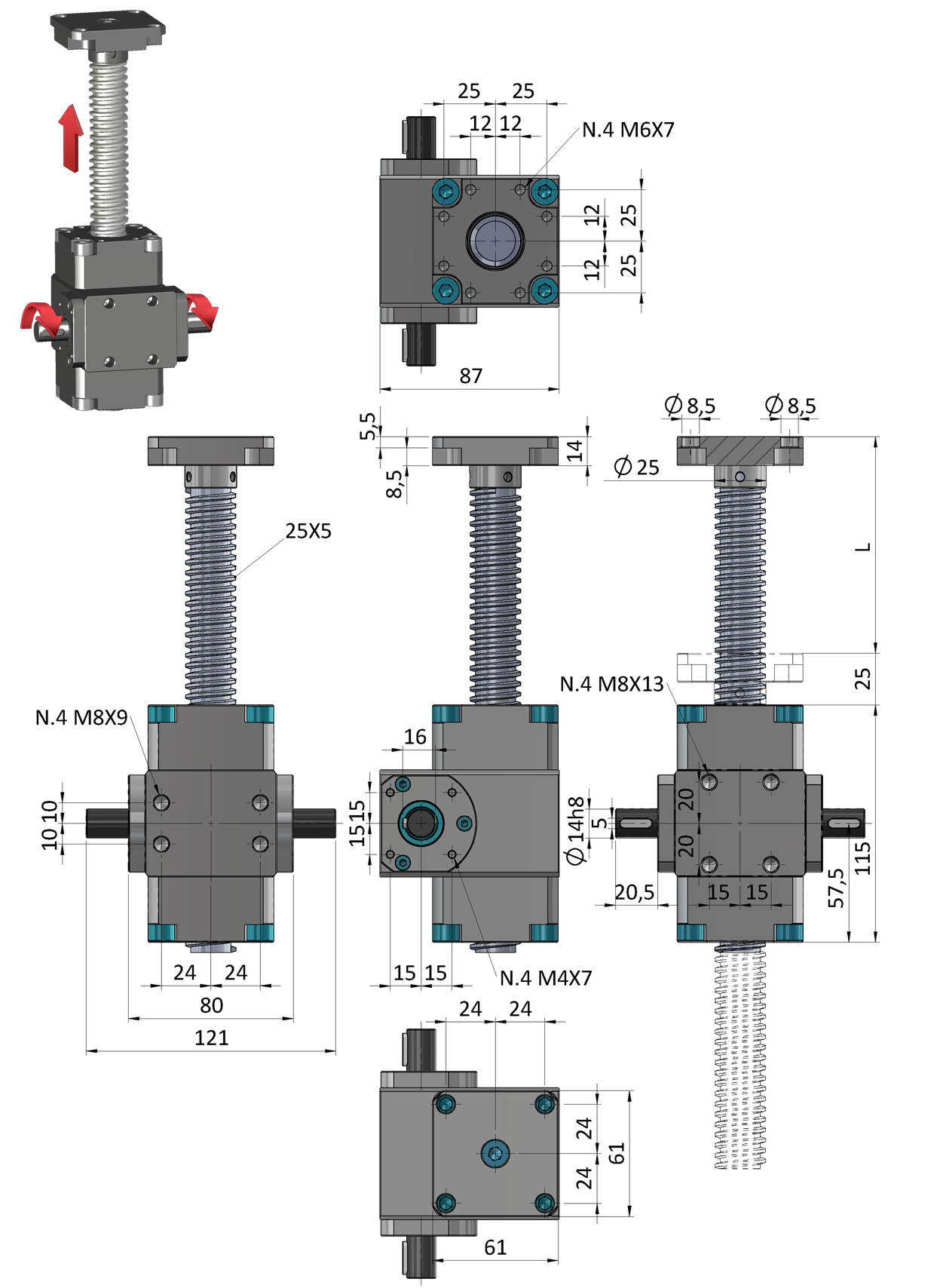
• Husillo trapezoidal en acero inoxidable TPN Ø25 – paso 5 mm
• Carcasa en aluminio anodizado, ligera y resistente a la corrosión
• Ejes y engranajes en acero endurecido con tratamiento superficial de alta resistencia
• Carga axial sobre el eje de entrada: 200 kg• Carreras estándar: 100 – 1000 mm
Versiones y accesorios disponibles
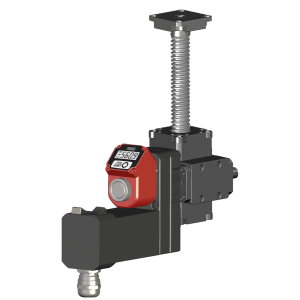
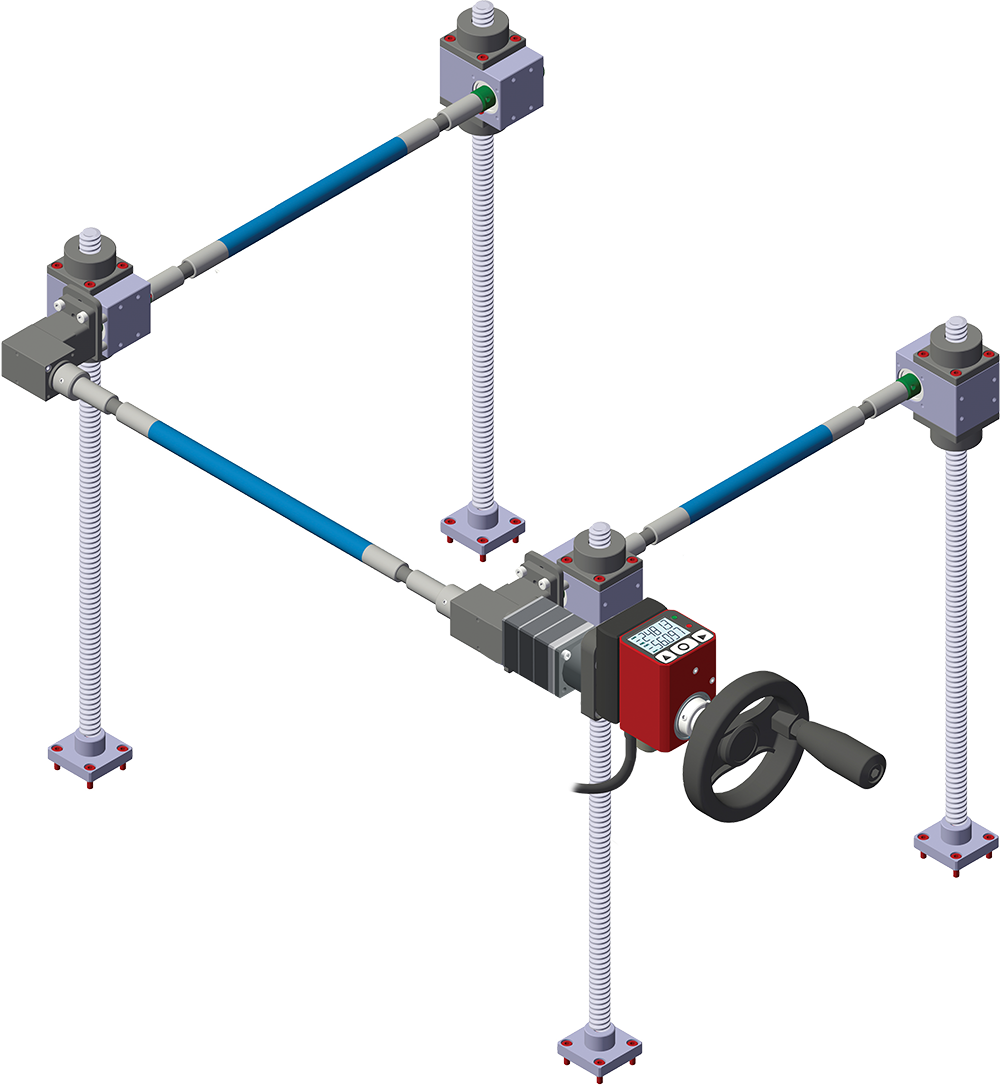
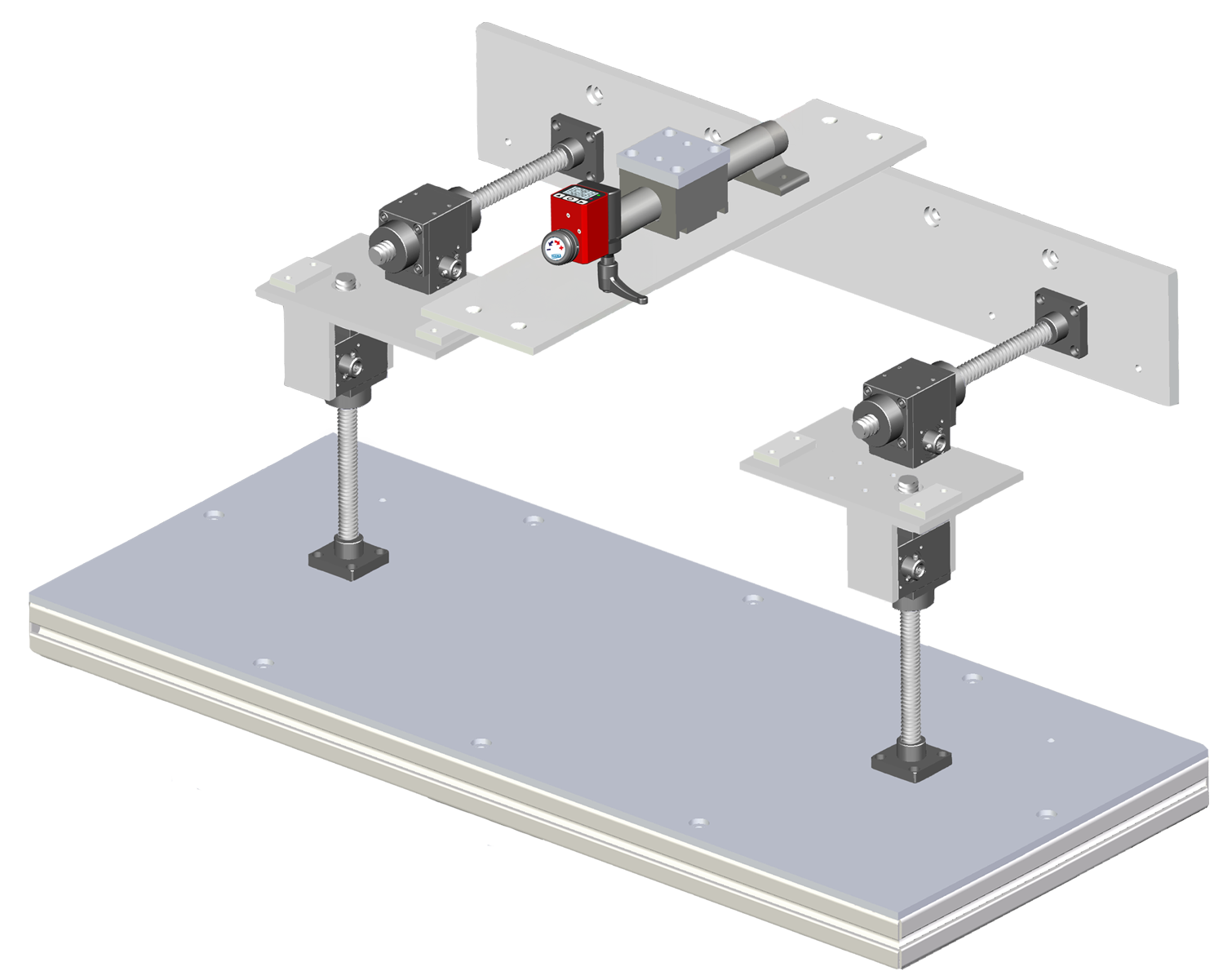
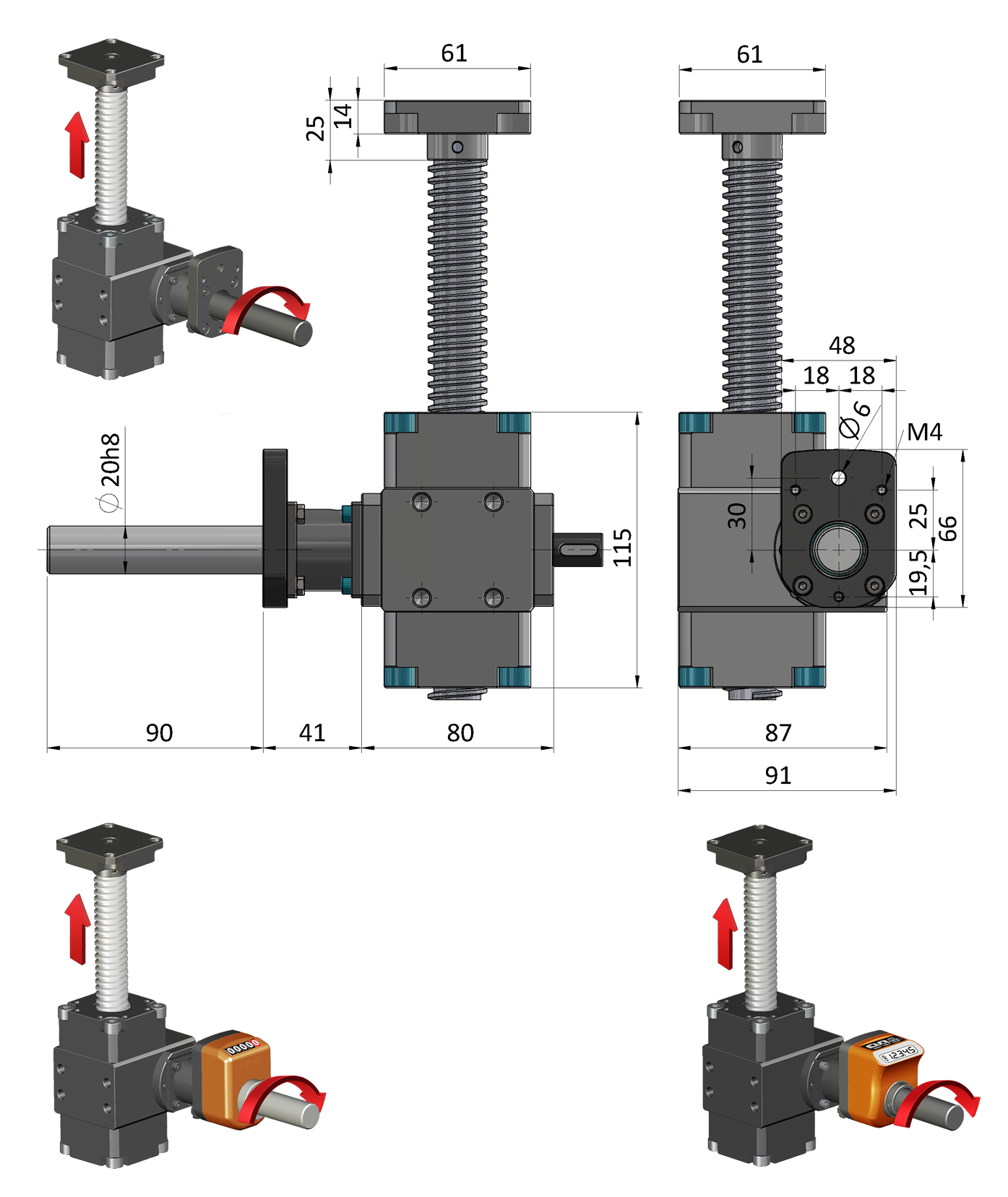
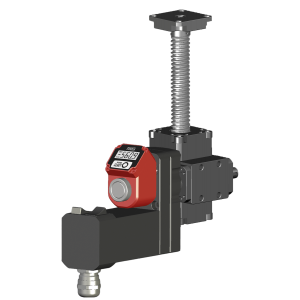
• Montaje con brida y prolongación de eje para indicadores digitales “OP7” o programables “EP7” (MAR60 FL-OP7)
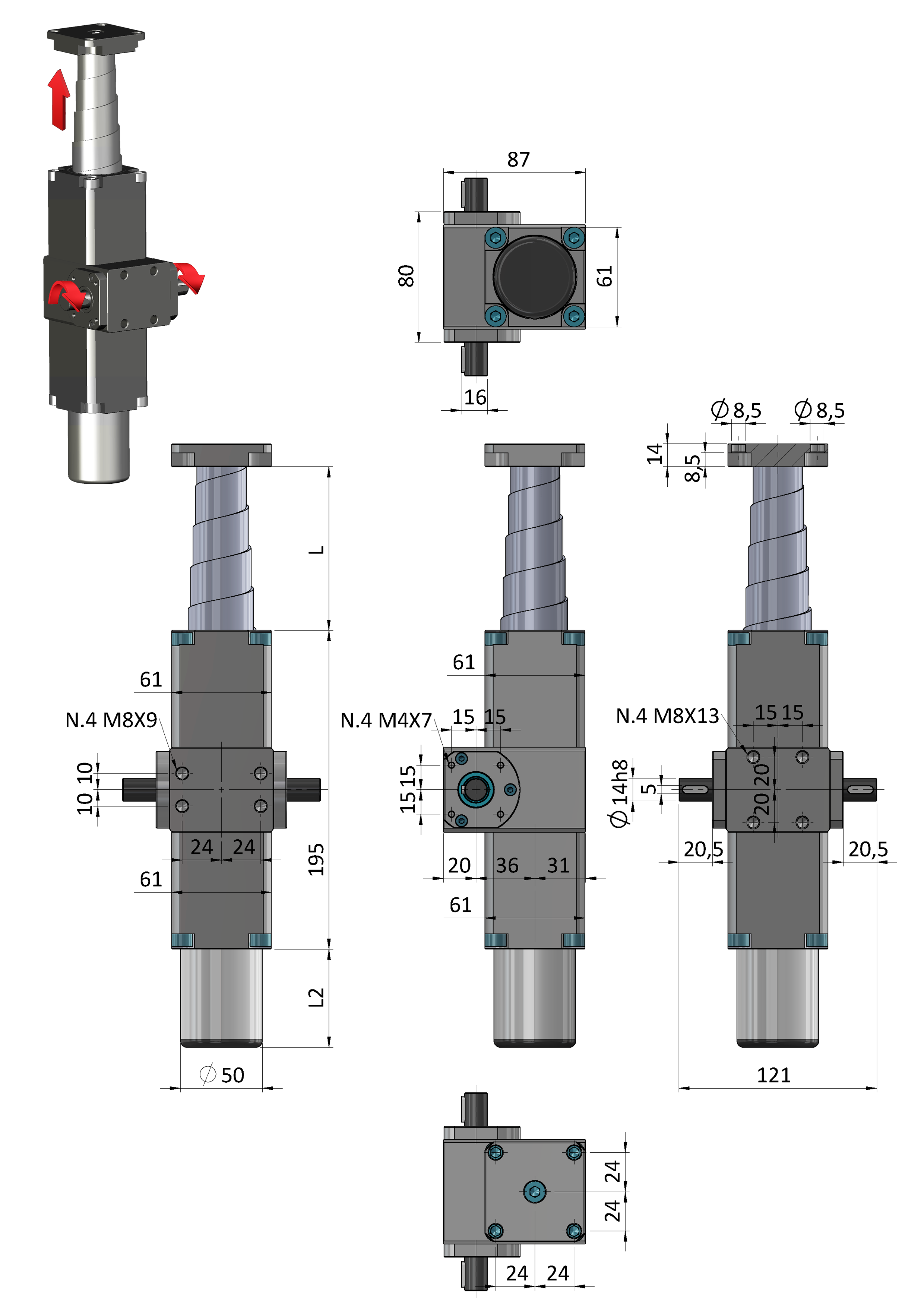
• Protección rígida en acero inoxidable con resorte helicoidal, hasta 650 mm de carrera
Galeria de fotos
|
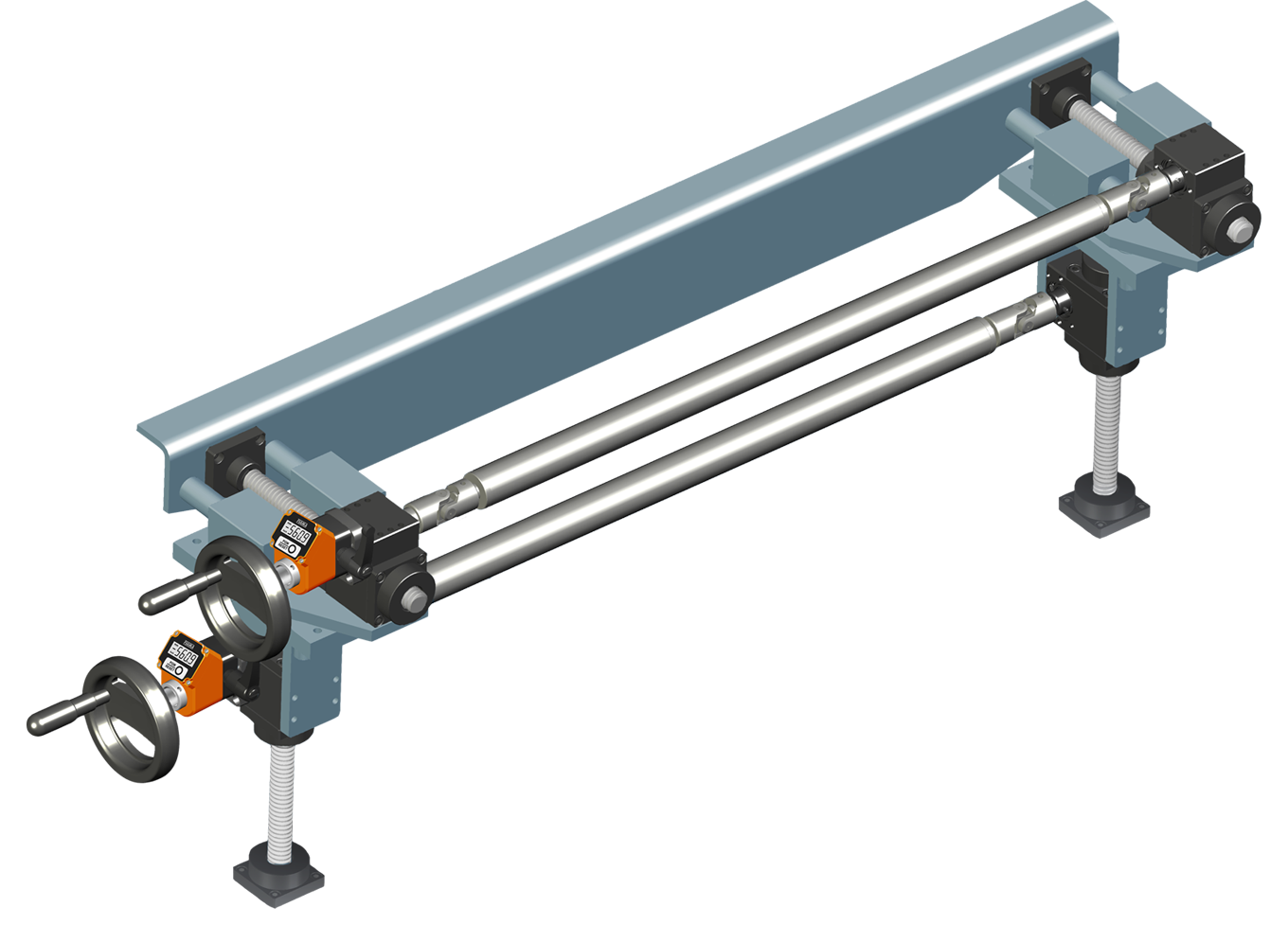
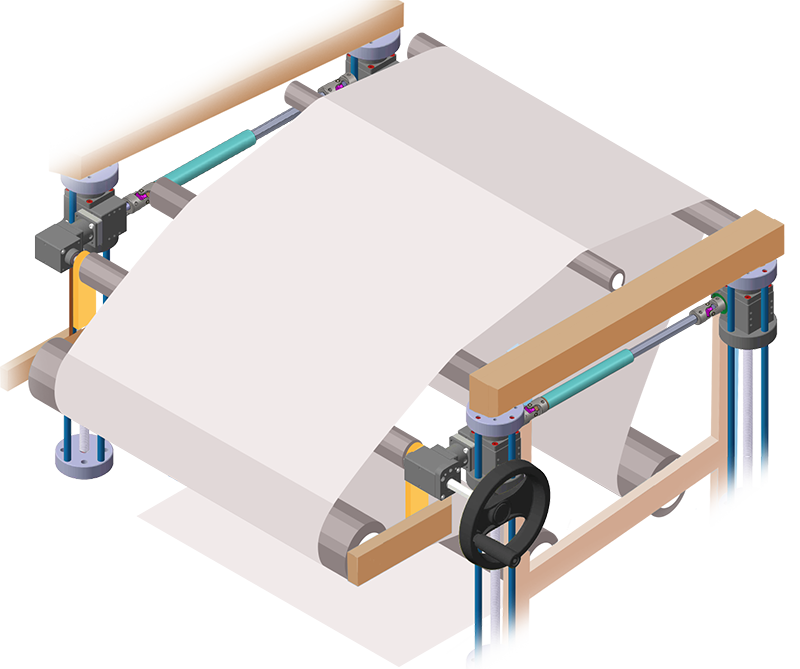
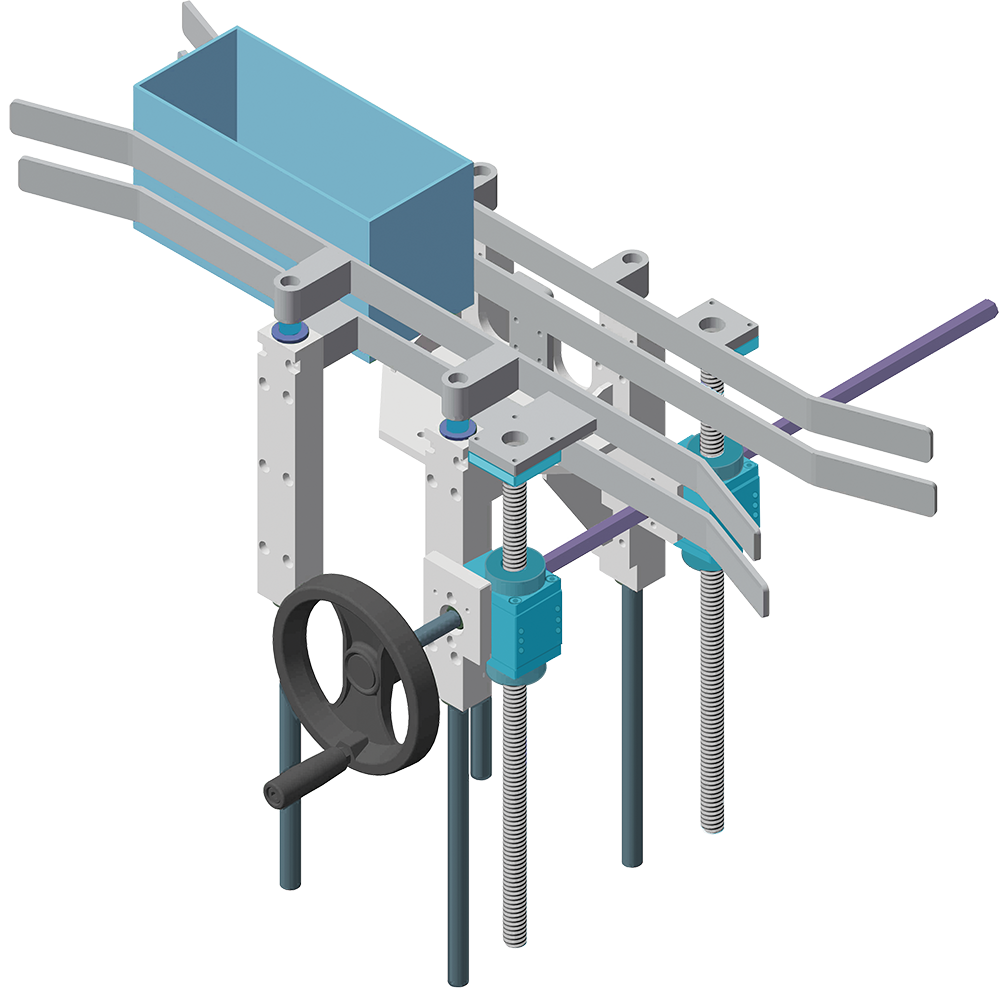
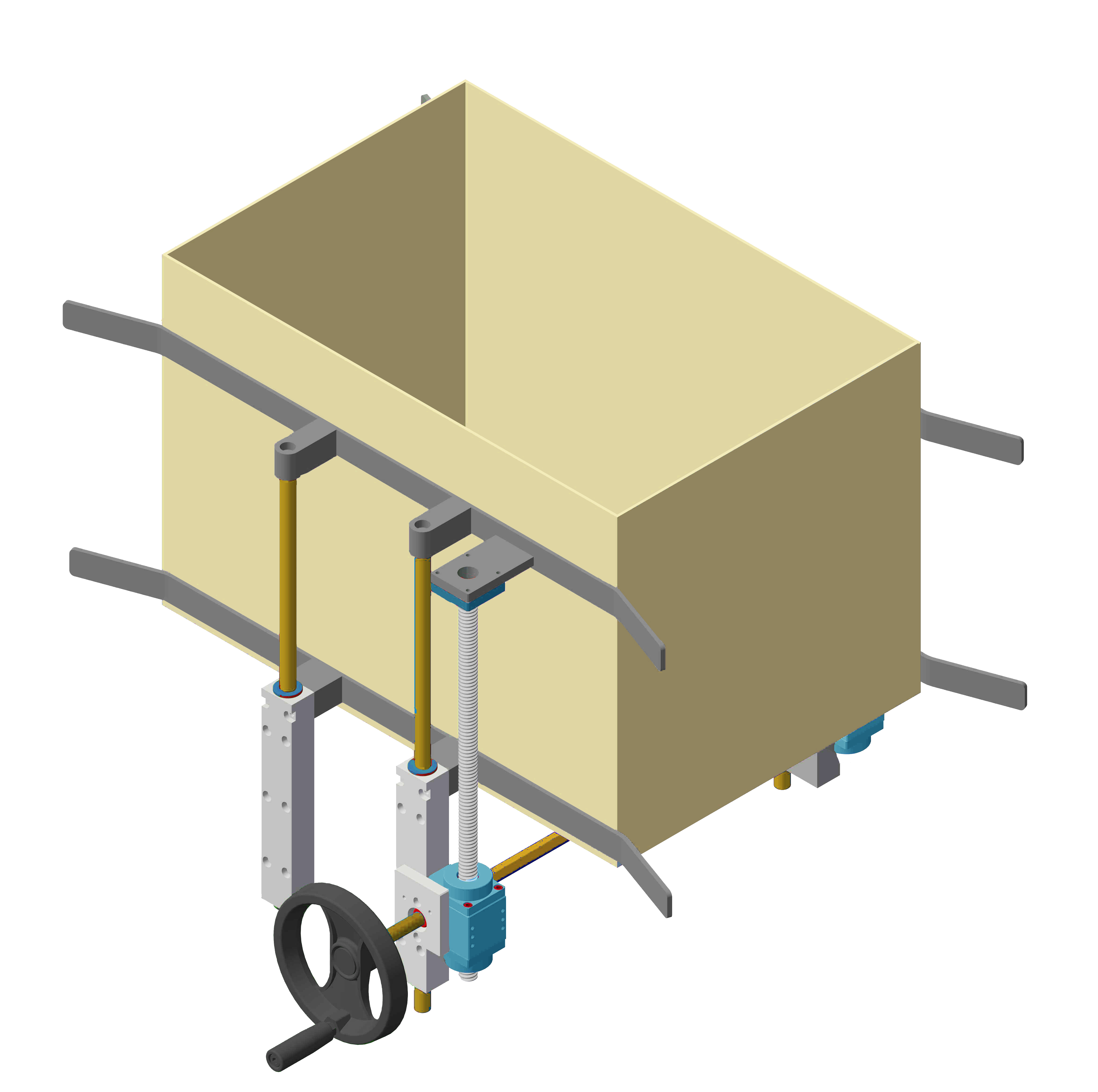
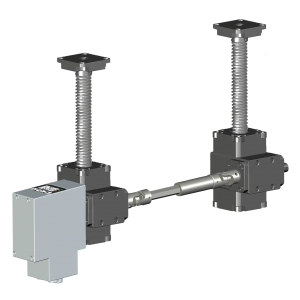
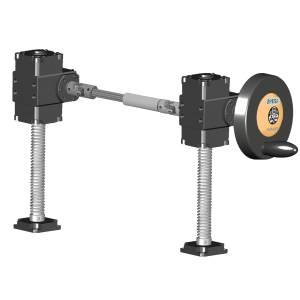
EJEMPLOS DE APLICACIÓN |
|
|
 |
.png) |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |

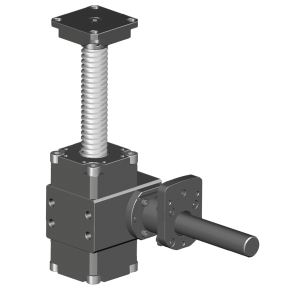
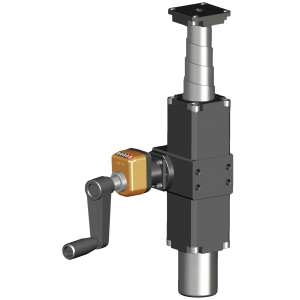
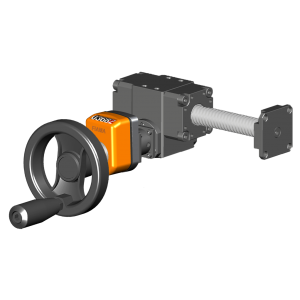
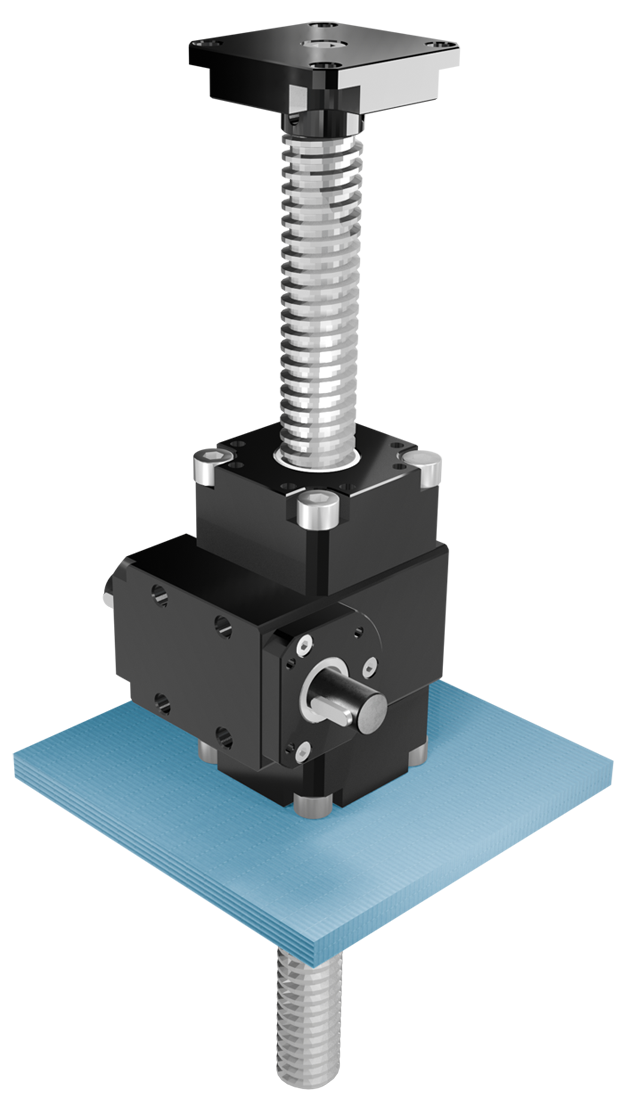
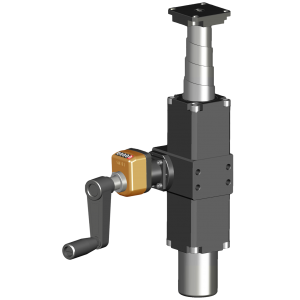
| MAR60 |
 |
|
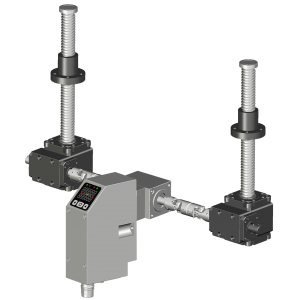
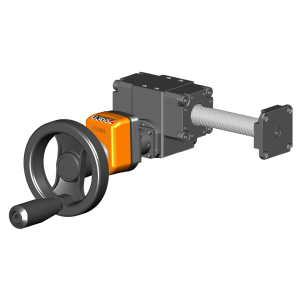
MAR60 FL-OP7/EP7 |
 |
|
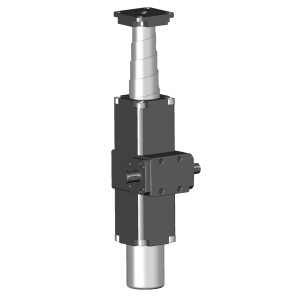
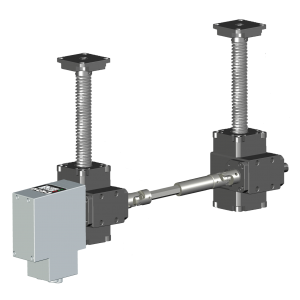
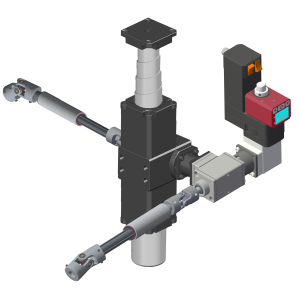
MAR60P |
 |
|
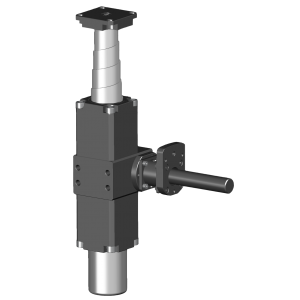
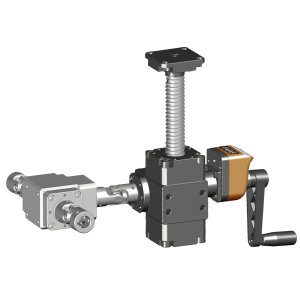
MAR60P FL-OP7/EP7 |
 |
|
VERIFICATIÓN DIMENSIONAMIENTO |
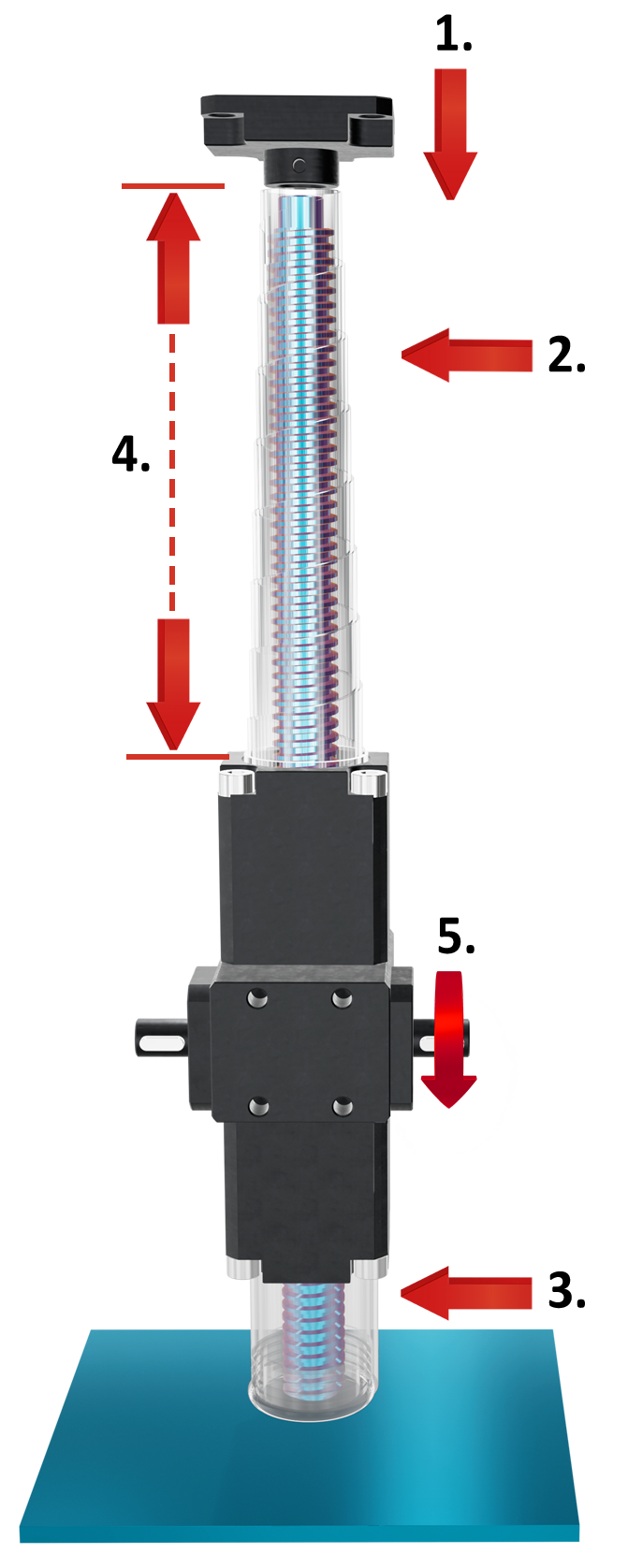 |
| 1. Cargo (kg) |
| 2. Protección superior en espiral (opcional) |
| 3. Protección rígida inferior (opcional) |
| 4. Carrera (mm) |
| 5. Rpm (max. 1500) |
| SOPORTE Y MONTAJE | |
|
L’unité doit être fixée solidement à la structure de la machine au moyen d’une base plane et rigide (supports non inclus dans la fourniture) |
|
|
Soporte inferior |
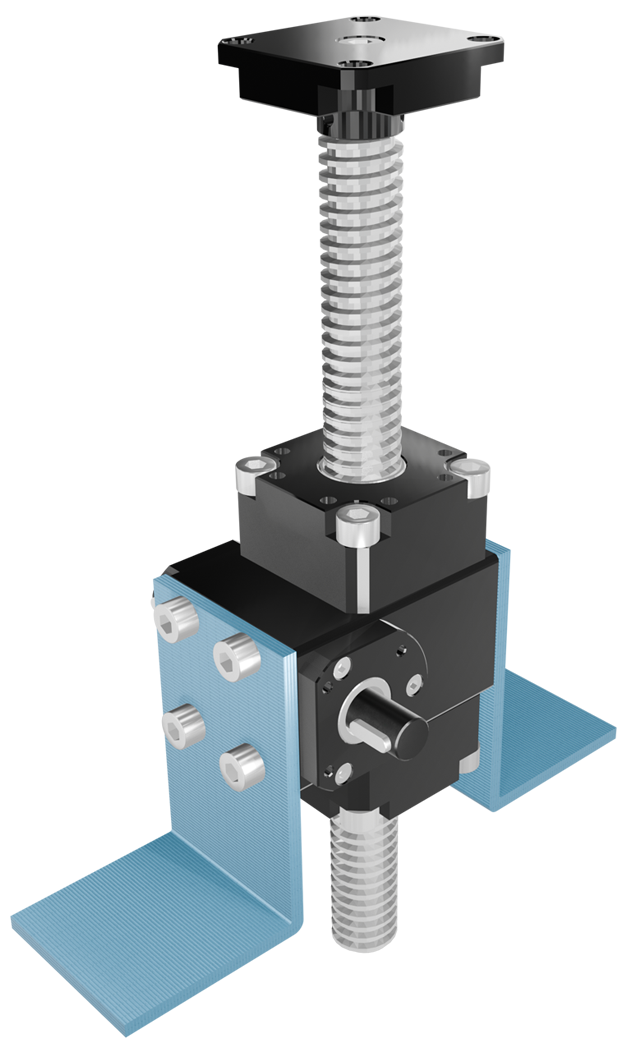
Soporte lateral |
 |
 |
|
Placa/escuadra bajo la carcasa para montaje óptimo |
Soporte lateral permite una carga máxima de 500 kg |
|
INSTALACIÓN |
||
 |
 |
|
|
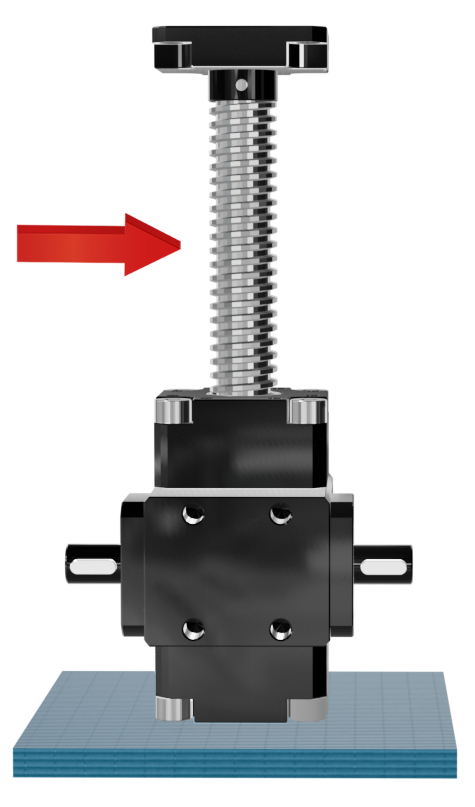
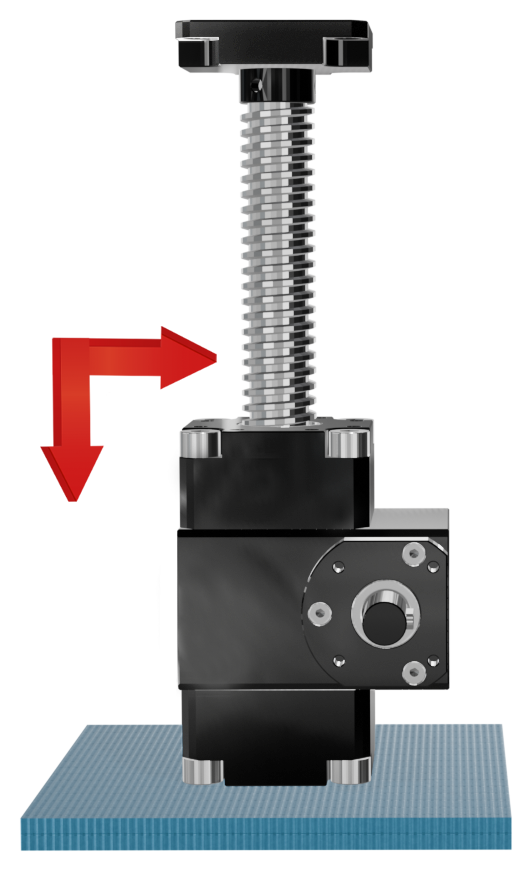
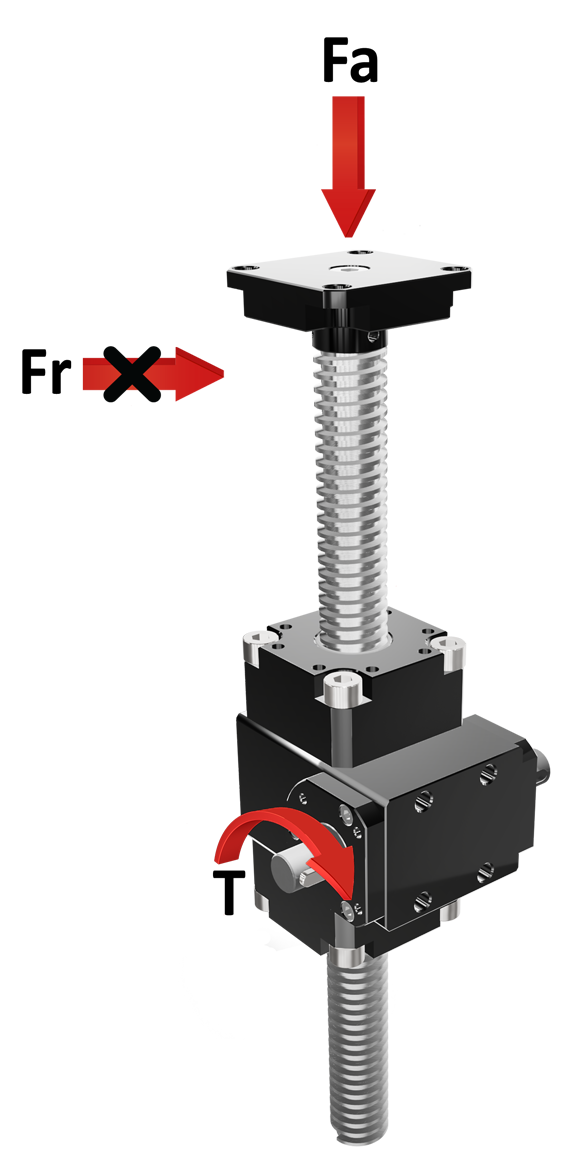
Evitar cargas radiales/laterales sobre el husillo trapezoidal, principal causa de fallos |
Husillo roscado y plano del reductor ortogonales; verificar la axialidad carga/husillo evitando excentricidades |
|
 |
||
|
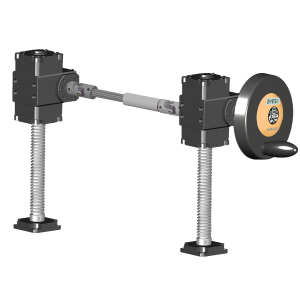
Varios gatos conectados: terminales alineados para una distribución uniforme de la carga; usar juntas para compensar desalineaciones |
||
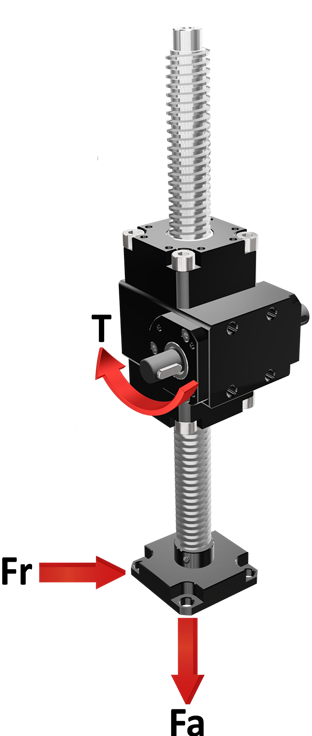
| REPRESENTATIÓN DE LAS CARGAS |
| Las cargas sobre los ejes, con respecto a su eje, pueden ser radiales (Fr) o axiales (Fa). Para los gatos de tornillo, pueden ser de tracción o compresión (a especificar al pedir).
Fr = fuerza/carga radial, que actúa perpendicular al eje Nota: los valores máximos admisibles de Fr, Fa y T dependen del modelo y de las condiciones de operación. |
|
Tracción |
Compresión |
 |
|
| CÁLCULO DE LA DURACIÓN DE EL REENVIO | |
|
Cálculo aplicable a todos los modelos presentes |
| DURACIÓN TEÓRICA ESPERADA✽ = 10.000h X Fu PAR RECOMENDADO (Nm) Fu = -------------------------------------- Ta PAR APLICADO (Nm) |
✽ La duración de 10.000h se entiende a las siguientes condiciones de funcionamiento:
● Par aplicado = par recomendado (ver tablas)
● Número máximo de 8 horas por día
● Temperatura de trabajo 20°
● Ausencia de impactos (choques)
● Ta Par de salida aplicado
● Par Máxima aplicable (ver tablas/modelos)
| GLOSSARIO |
| FR = fuerza radial |
| FA = fuerza axial |
| R = rendimiento |
| T = par transmisible |
| Tm = par máximo |
| Tr = par aplicado |
| Ta = par aconsejado |
| To = par en salida |
| Ti = par en entrada |
| Pn = potencia |
| N = Newton |
| Nm = Newton metro |
| fu = factor de utilización |
| i = relación de transmisión |
| rpm = revoluciones por minuto (1/min) |
| n1 = árbol en entrada |
| n2 = árbol en salida |
| M = árbol de salida sobresaliente/macho |
| F = árbol de salida cable ciego/hembra |
| F = árbol de salida cable pasante/hembra |
|
⦿ Para un correcto dimensionamiento es necesario conocer: potencia transmitida (Pn), Par de Salida (T) y velocidad de rotación in entrada (rpm). |
|
⦿ Para la identificación del reenvío/reductor mas apropiado a las propias necesidades, comprobar los valores escritos en la tabla para cada modelo, en el caso las cargas y los rendimientos reales sean muy cerca de los valores de la tabla contactar el departamento técnico. |
| ⦿ Todas las tablas dimensionales traen medidas lineales expresadas en ‹mm›, a menos que no sea especificado de otra manera.Todas las relaciones de reducción se expresan en fracción, salvo indicación contraria. Todas las fuerzas se indican en N, las cargas en kg, los pares en Nm y los rendimientos en %, salvo indicación contraria. |









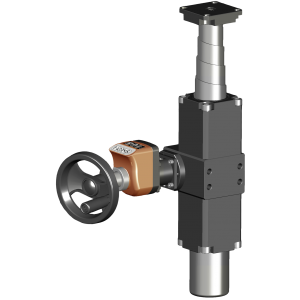
Volantito de maniobria con manija rebatible, material thermoplástico, buje de acero.
➜ para obtener información más completa, ver V.R

Manivela con manija rebatible, material thermoplástico, buje de acero.
➜ para obtener información más completa, ver V.M

Árboles disponibles Ø6, Ø8, Ø10, Ø14, Ø20.
➜ para obtener información más completa, ver Soportes
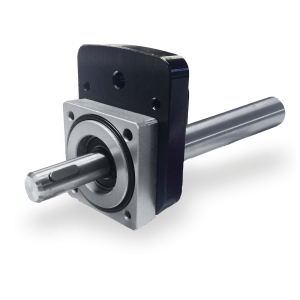
Soportes con brida con el eje de extensión de indicadores de posición.
➜ para obtener información más completa, ver Soportes con brida

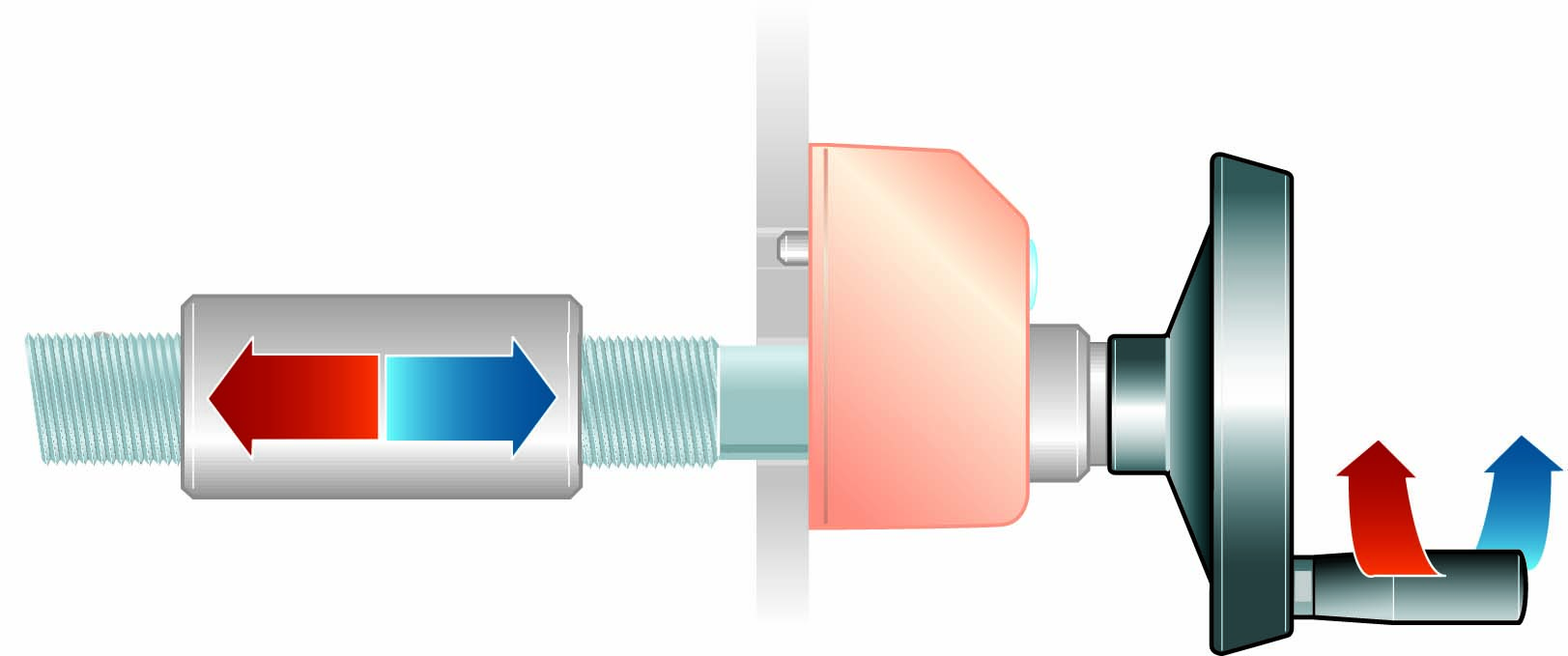
Las juntas universales articuladas «GC» y «GCC» se utilizan para la transmisión de par y movimiento de elementos no alineados.
Características principales: aplicación universal, alta fiabilidad, sin mantenimiento, facilidad de uso, extrema precisión.
• Cuerpo en acero inoxidable AISI303, totalmente mecanizado en macizo.
• Apto para movimientos intermitentes (UI) y continuos (UC).
• Ángulo de trabajo máx. 45 °.

• Los ejes telescópicos son ideales para conectar dos elementos con distancias entre ejes fijas o variables.
• Apto para ajustes y uso continuo.
• Pares de 5 Nm a 10 Nm.
➜ para obtener información más completa, ver ATE

• Los ejes telescópicos son ideales para conectar dos elementos con distancias
entre ejes fijas o variables.
• Apto para ajustes y uso continuo.
• Pares de 25 Nm a 50 Nm.
➜ para obtener información más completa, ver ATS

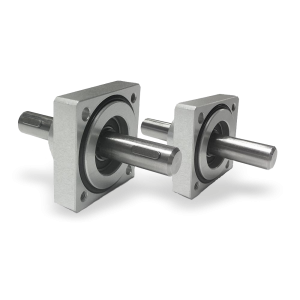
Los ejes rígidos AR se utilizan para la conexión entre dos ejes perfectamente alineados que no presentan desalineaciones.
Las principales características son la aplicación universal y la alta fiabilidad.
• Apto para accionamientos manuales y motorizados.
• Sencillos y rápidos de montar, no requieren soportes adicionales.
➜ para obtener información más completa, ver AR






• Contador a 5 cifras (standard cifra roja para indicar los décimos; a pedido 2 cifras roja para los centésimos o 5 cifras negras para los mm).
• Lectura hasta 99999. Altura cifras 7mm.
• Orificio estándar ø20 (OP7) o ø25 (OP7F25), otros menores con buje de reducción.
➜ para obtener información más completa, ver OP7

• Medición de desplazamientos lineales o angulares, compacto, fácil de montar
• Montaje simple a través del eje hueco
• La alimentación es interna por batería
➜ para obtener información más completa, ver EP7

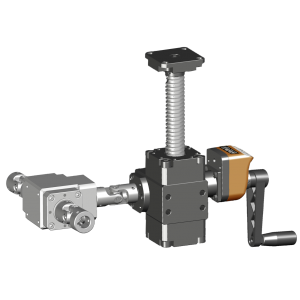
66/6: son reenvíos a ángulo con engranajes cónicos aptos a la transmisión de movimientos rotatorios entre dos arboles perpendiculares.
• Disponible con relacion de reducción: 1:1 -1:2 - 2:1
• Caja de aluminio anodizado negro; arboles de acero inoxidable AISI 303
• Par 45 Nm
➜ para obtener información más completa, ver sec. "Reenvios a angulo y ..." en el menú desplegable de la izquierda.

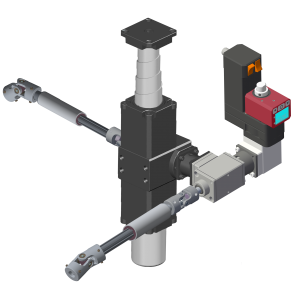
● Accionamiento y posicionamiento automático de los ejes en un único dispositivo
● Diseño ultracompacto, montaje sencillo con eje hueco de Ø 14 con llave de 5 mm rebajada.
● Interfaces de salida: Profinet, EthernetIP, PowerLink, EtherCat.
➜ para obtener información más completa, ver SERVO.ALL

La unidad Servo-OP es un actuador eléctrico rotativo que, junto con nuestro indicador OP3 (opcional), permite visualizar la posición, directamente mediante dos botones.
• Cuerpo de aluminio anodizado, dimensiones reducidas
• Reductor con salida de árbol hueco
➜ para obtener información más completa, ver SERVO.OP
Galeria de fotos

Richiedi l'accesso
|
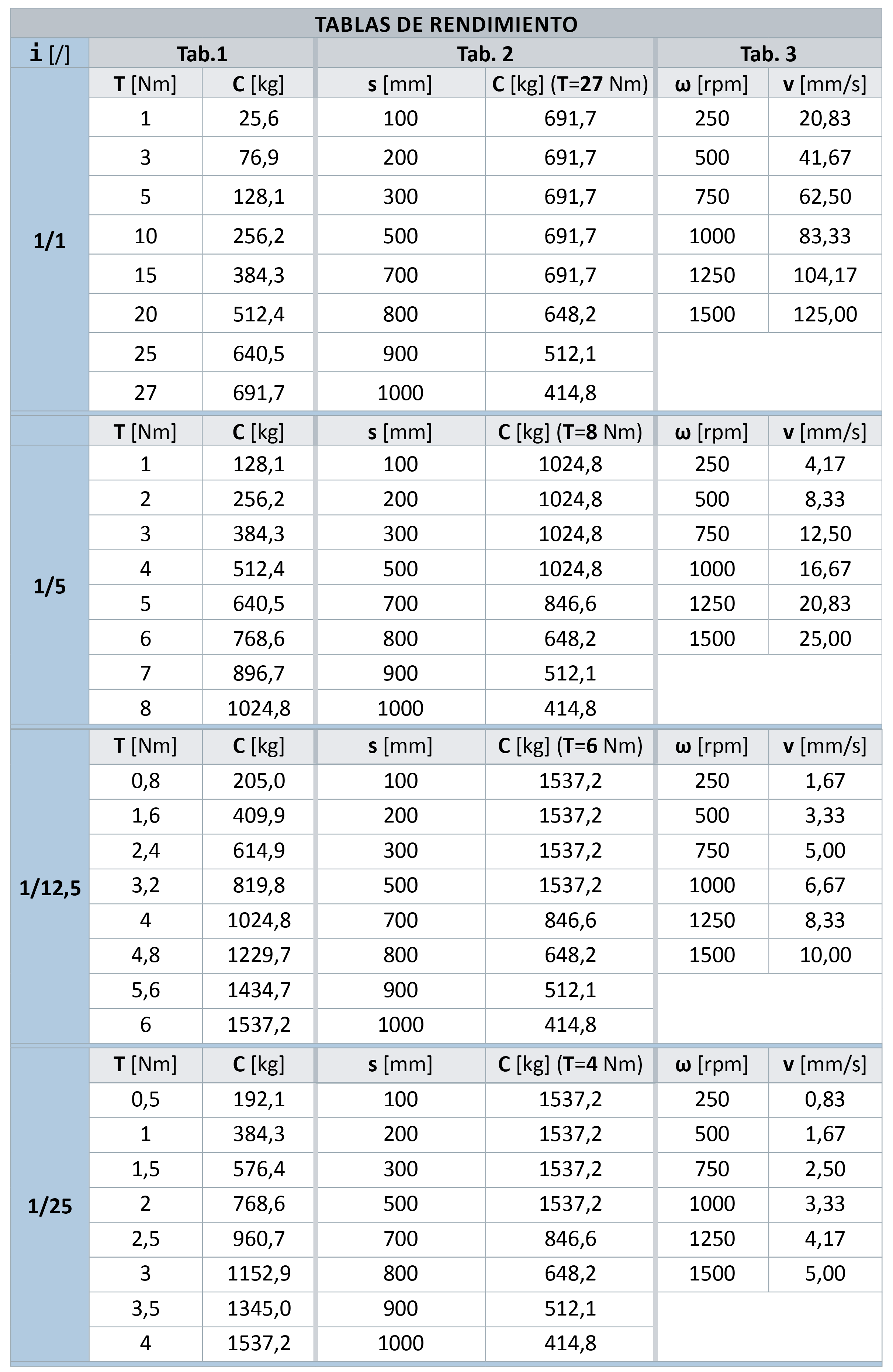
LEYENDA PARA TABLAS DE RENDIMIENTO |
||
|
Tab. 1 |
= |
carga movida según el par de entrada |
|
Tab. 2 |
= |
carga movida según la carrera del tornillo acme (con guías) |
|
Tab. 3 |
= |
velocidad de traslación del tornillo basada en el no. vueltas de entrada |
|
i |
= |
relación de reducción [/] |
|
T |
= |
par [Nm] |
|
C |
= |
carga movida [kg) |
|
s |
= |
corsa |
|
ω |
= |
carrera [mm] |
|
v |
= |
velocidad de traslación [mm/s] |