66/8
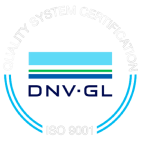
Winkelgetriebe für Kurzeitbetrieb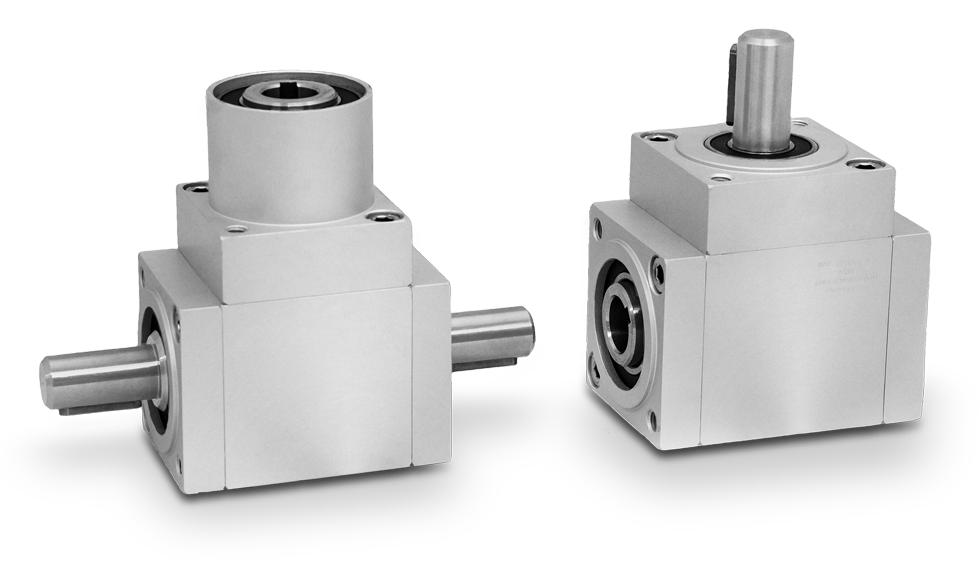
|
• Lieferbare Übersetzungen: 1:1 - 1:2 (standard) - 2:1 (Lieferbar in Ausführungen «A»-«B»-«C»). |
||
|
• Übersetzungen 1/2 und 2/1 nur mit Spiralkegelräder lieferbar. |
||
|
• Druckgussgehäuse, eloxiert; Wellen aus Edelstahl AISI 303. |
||
|
• Drehmoment 90 Nm. Radiallast 150 kg - Axiallast 15 kg (Tab. 4). |
||
|
• Ausführungen: |
||
|
- Version «A» mit 2 Ausgangswellen, Gewicht 2500 g. |
||
|
- Version «B» mit 3 Ausgangswellen, Gewicht 2700 g. |
||
|
- Version «C» mit 3 Ausgangswellen mit Rückwärtsdrehung, Gewicht 2770 g. |
||
|
- Version «D» mit 3 Ausgangswellen, 2 durchgehende Hohlwellen, Gewicht 2700 g. |
||
|
• Standard output shafts: M = male Ø20/ F = female Ø20. |
||
|
Lieferbar auf Anfrage: |
|
|
|
▪ Gehäuse in Edelstahl AISI 303. |
||
|
▪ Ausführungen mit Spiralkegelräder für Übersetzung 1/1. |
||
|
▪ Grease fitting is available in all versions. |
Fotogalerie



|
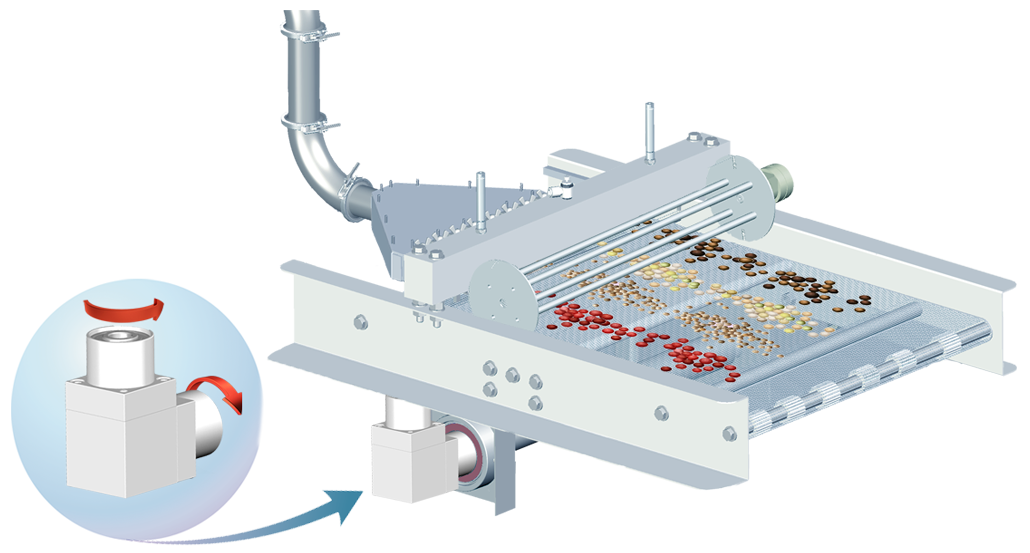
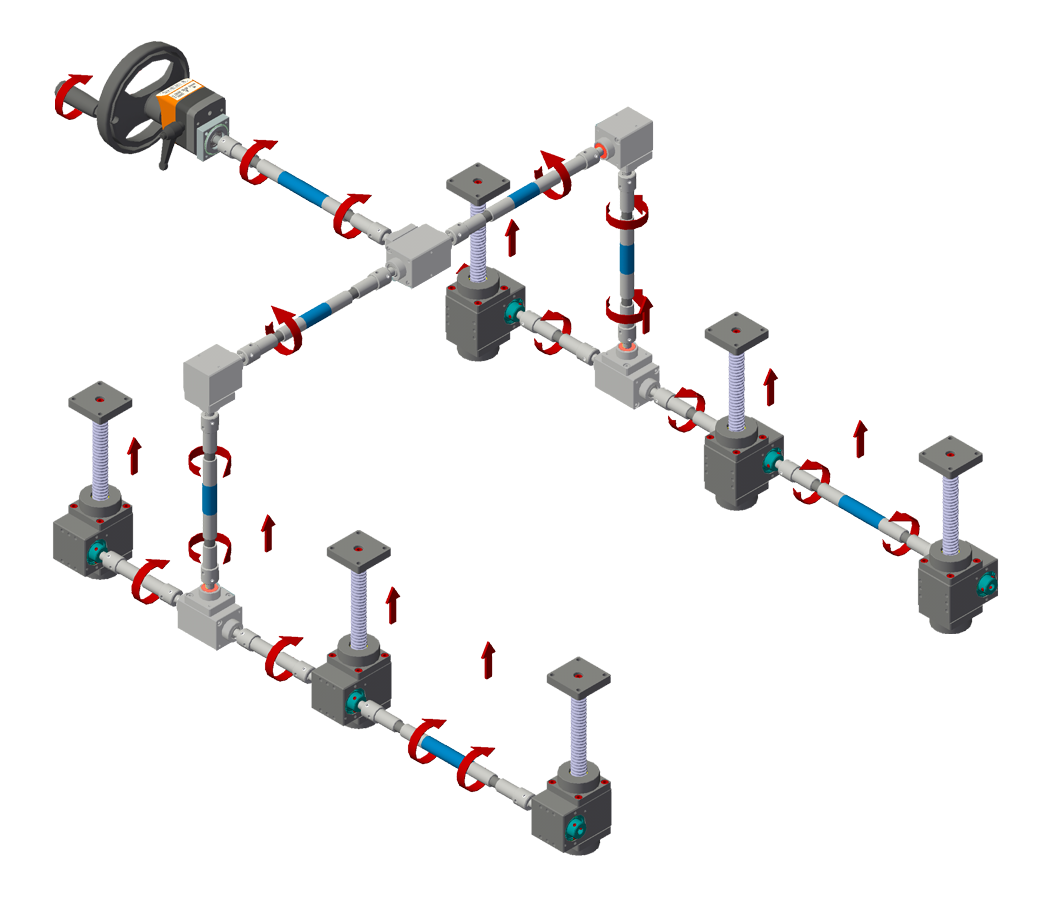
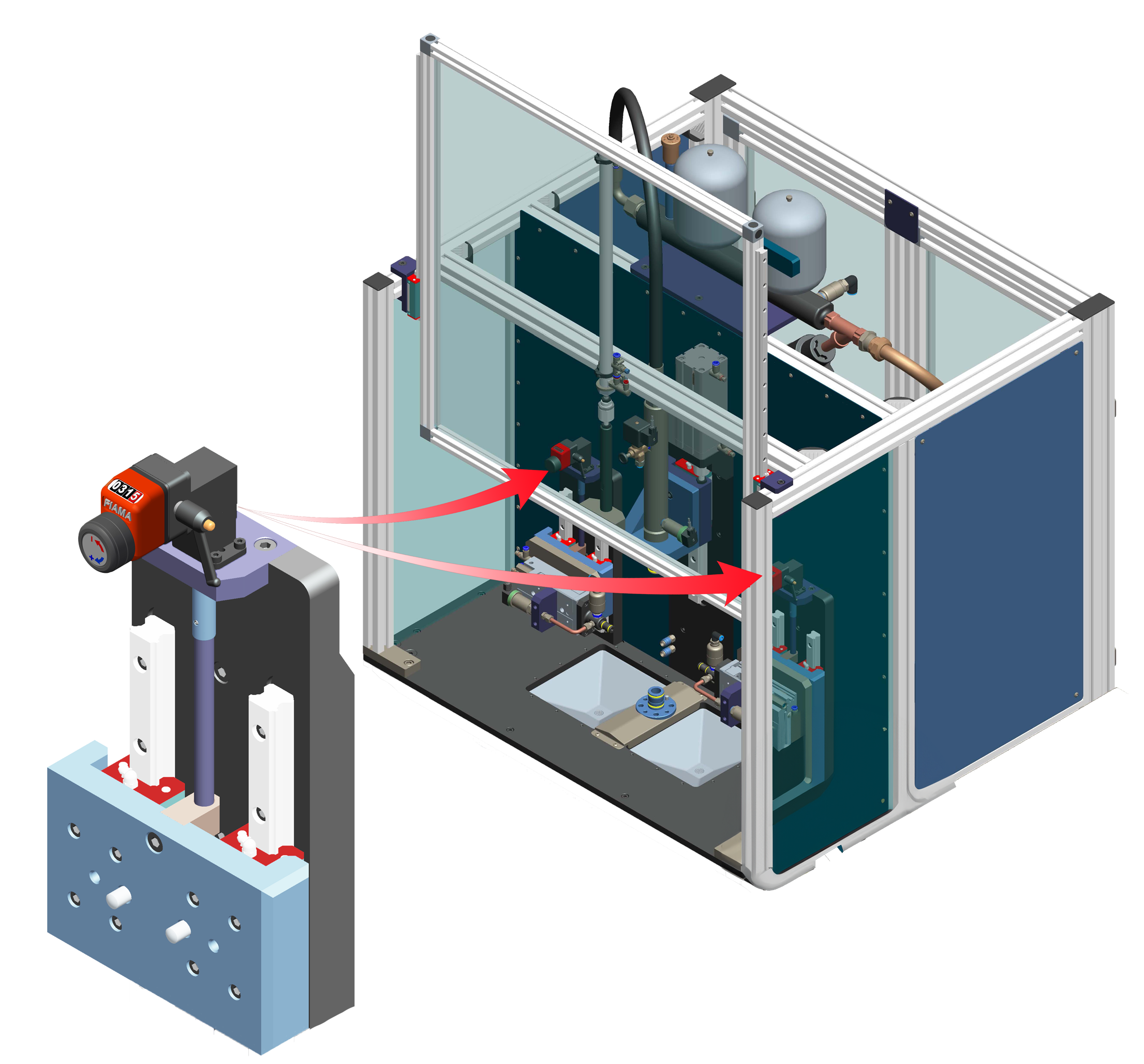
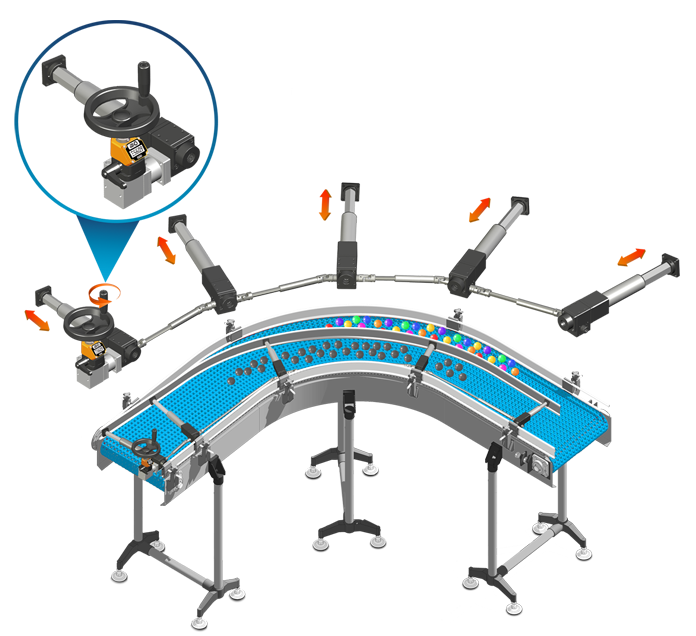
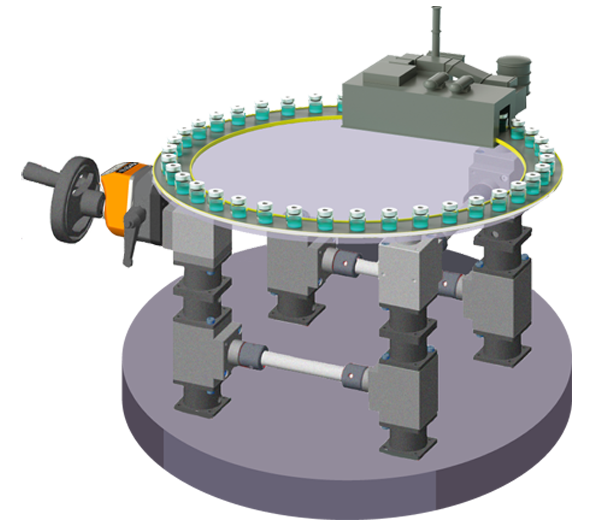
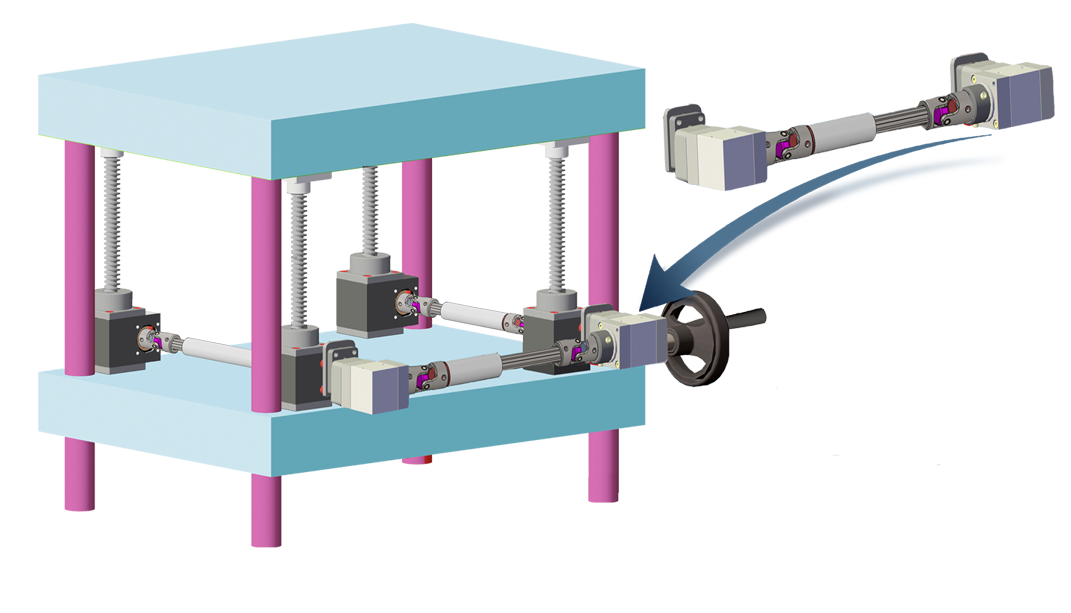
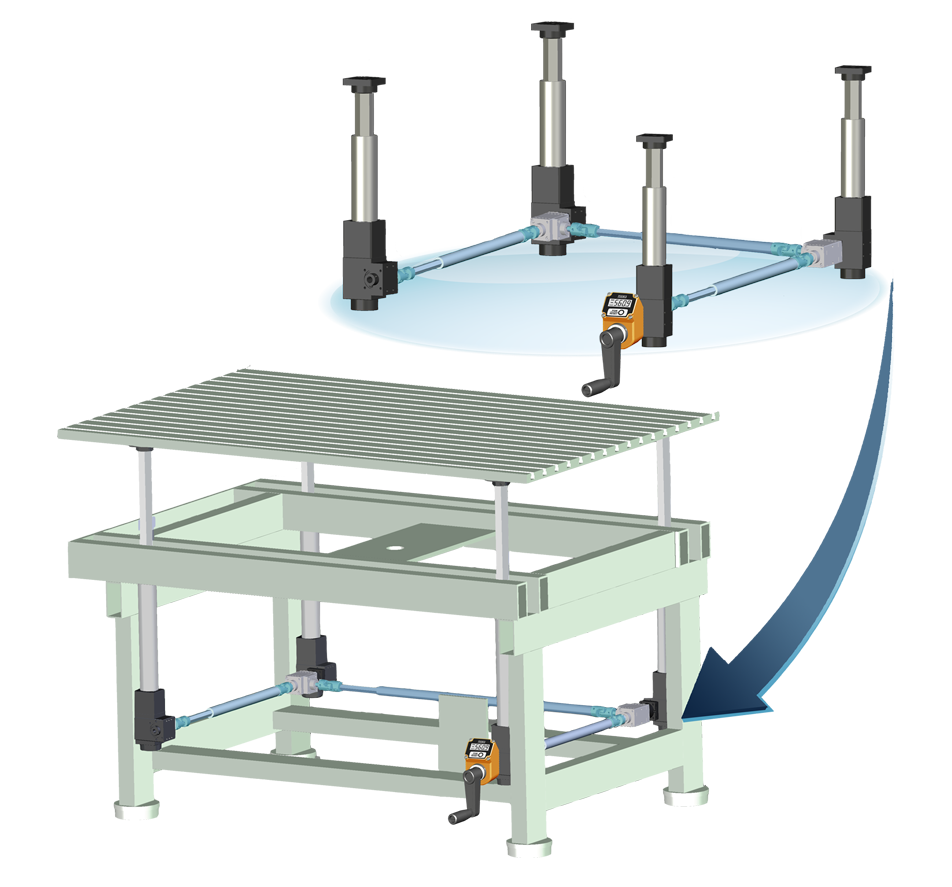
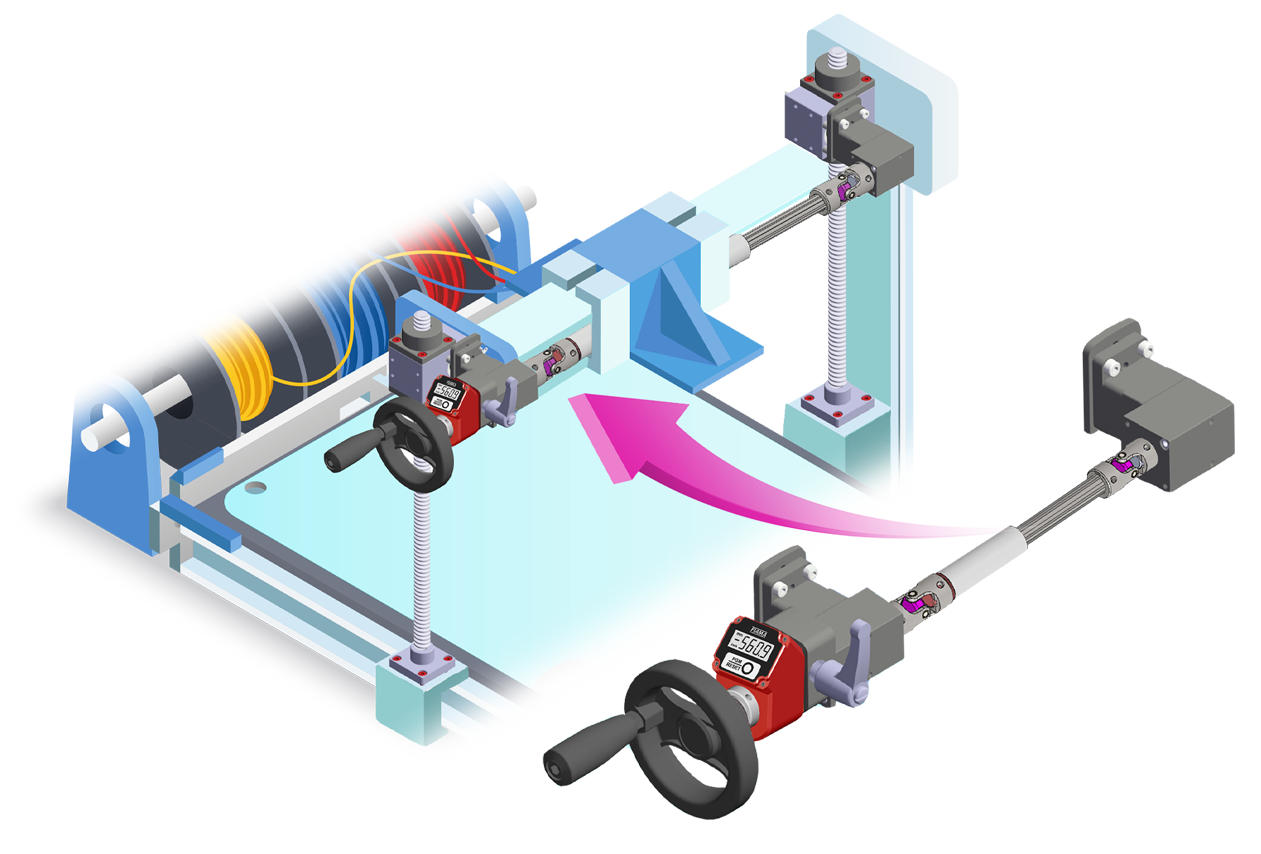
ANWENDUNGSBEISPIELE |








| LIEFERBARE AUSFÜHRUNGEN |
| M = Vollwelle |
 |
| F = Hohlwelle |
 |
| F = durchgehende Hohlwelle (nur für Ausführung ⟪D⟫) |
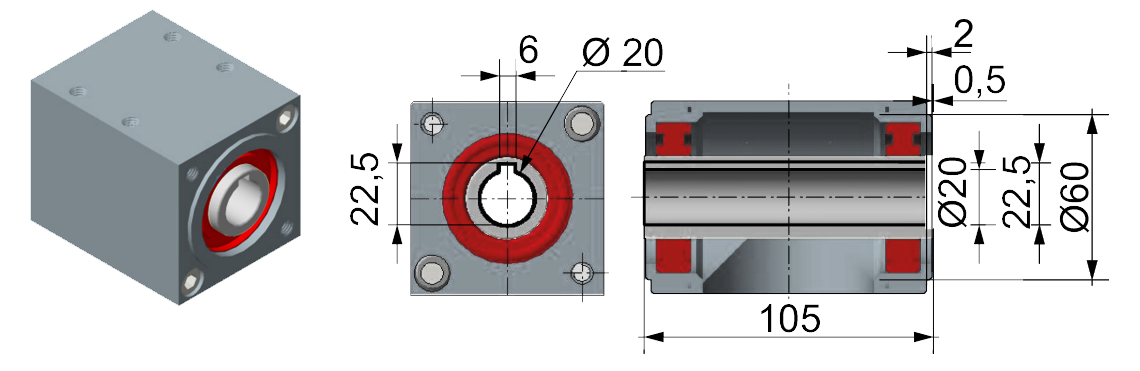 |
| ABMESSUNGEN |
| AUSFÜHRUNG ⟪A⟫ - M-M |
 |
| AUSFÜHRUNG ⟪A⟫ - M-F |
 |
| AUSFÜHRUNG ⟪A⟫ - F-F |
 |
| AUSFÜHRUNG ⟪B⟫ - M-M-M |
 |
| AUSFÜHRUNG ⟪B⟫ - F-M-M |
 |
| AUSFÜHRUNG ⟪C⟫ - M-M-M mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪C⟫ - M-F-F mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪C⟫ - F-M-M mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪C⟫ - F-F-F mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪C⟫ - F-F-F mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪D⟫ - M-F-F mit Rückwärtsdrehung |
 |
| AUSFÜHRUNG ⟪D⟫ - F-F-F mit Rückwärtsdrehung |
|
| KONFIGURATIONS- UND UMDREHUNGSSINN | ||||||
| ⟪A⟫ | ⟪B⟫ | ⟪C⟫ | ⟪D⟫ | |||
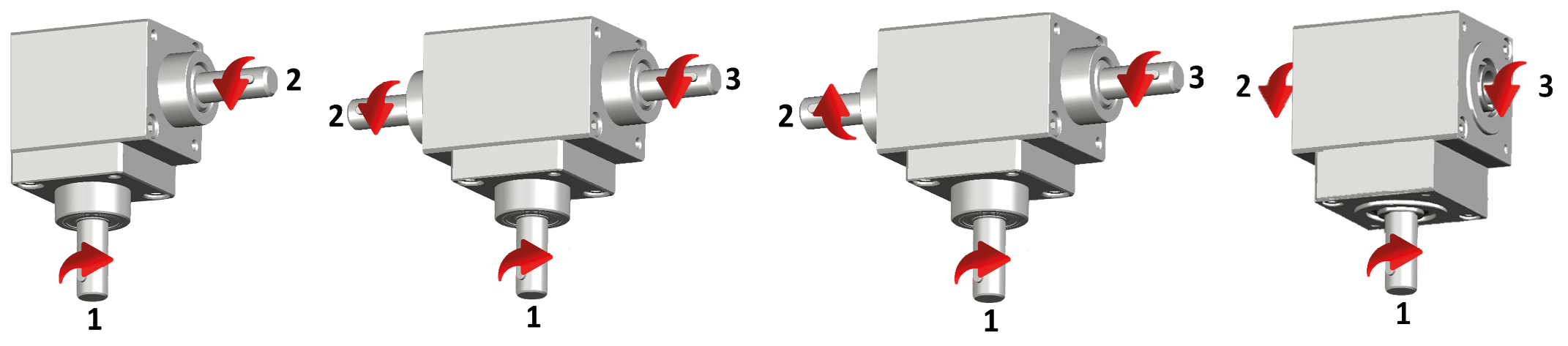 |
||||||
| Die Drehrichtung hängt von der Konfiguration und von der Positionierung ab. |
|
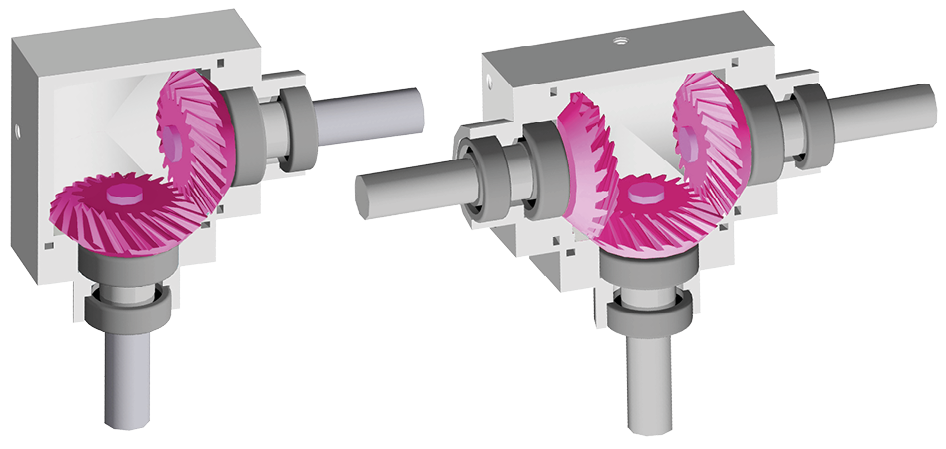
DARSTELLUNG VON KEGELRÄDER |
|||
| Gerade Kegelräder | Spiralkegelräder ‹SP› | ||
 |
 |
||
|
Mittlere Lasten und Geschwindigkeiten |
+ 30 % Lasten und hohe Geschwindigkeiten |
||
|
DARSTELLUNG DER ÜBERSETZUNGVERHÄLTNISSE |
|
|
 |
|
|
Das Übersetzungsverhältnis hängt von der Welle 1 gegenüber den Befestigungsbohrungen M_ ab |
|
|
Beispiel: Übersetzung 1:2 |
Beispiel: Übersetzung *2:1 |
|
Welle 1 = 10 rpm |
Welle 1 = 5 rpm |
|
Welle 2 = 5 rpm |
Welle 2/3 = 10 rpm |
| * nicht lieferbar in Version «D» | |
|
DARSTELLUNG DER KONSTRUKTIVEN FORM |
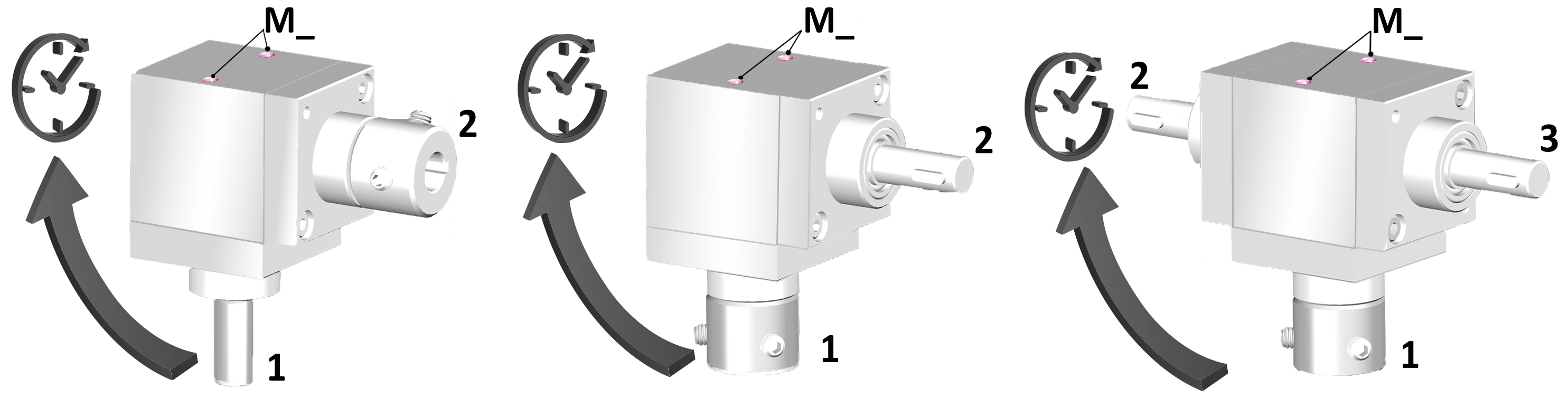 |
| Durch Welle 1 bestimmt, die gegenüber der Befestigungsbohrungen M_ liegt. Die anderen folgen den Uhrzeigersinn. |
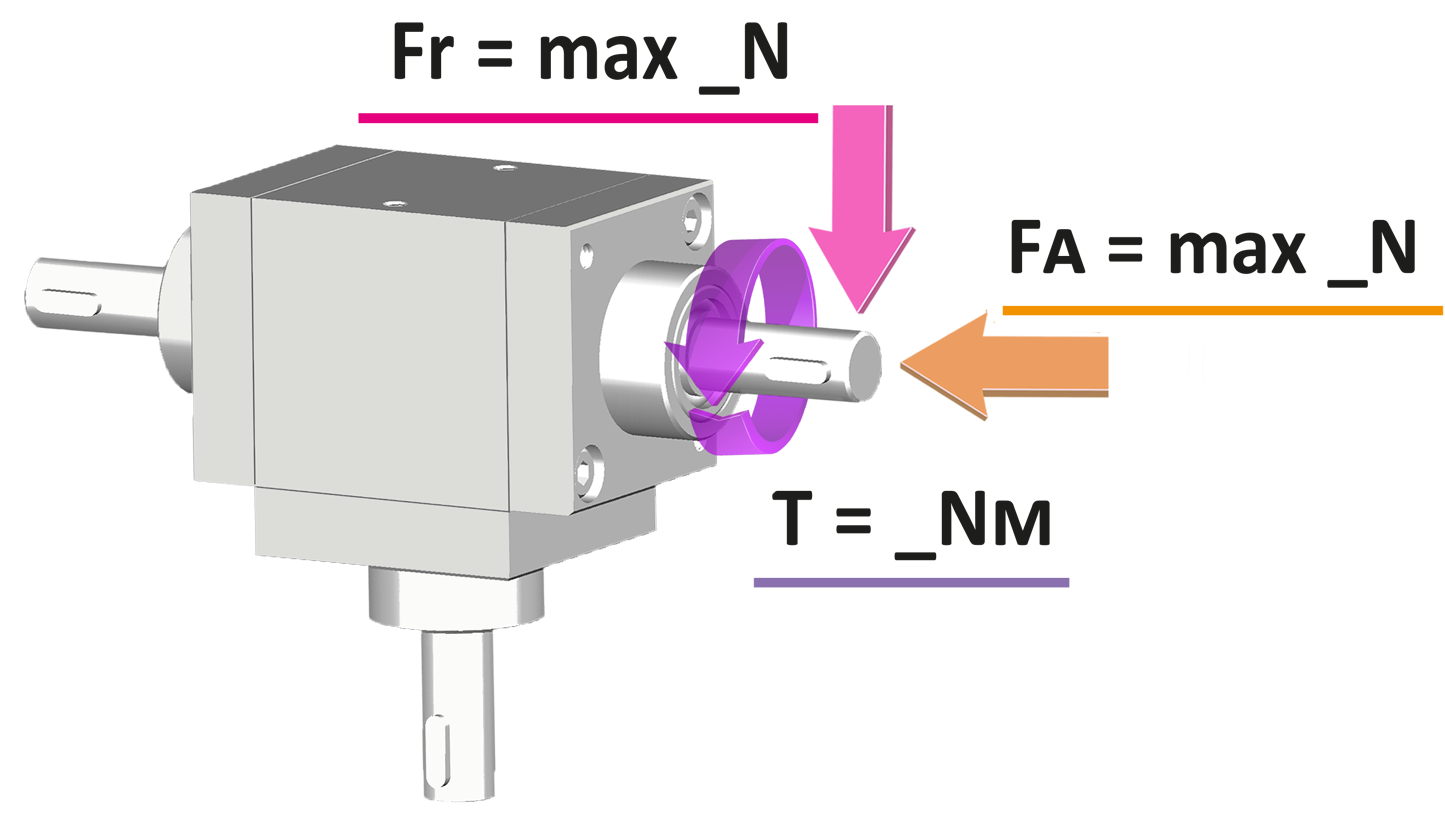
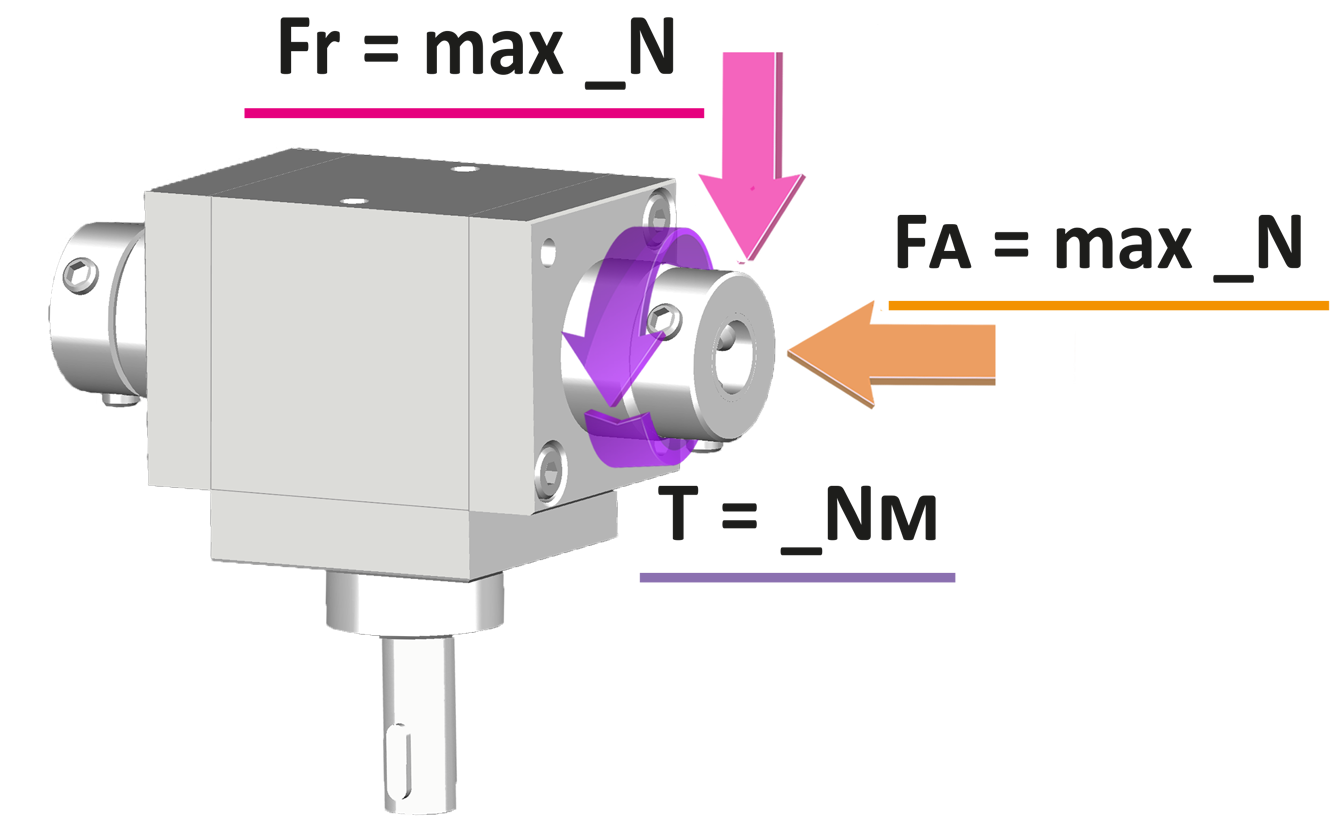
| DARSTELLUNG DER RADIAL- UND AXIALLASTEN | ||
|
«B» |
«D» |
|
 |
 |
|
|
Fr = Radiallast 1500 N |
||
|
Hinweis: radiale Belastung (z. B. Riemenspannung) ist nur auf die lange Welle «B» und «D» erlaubt; andernfalls ist eine Abstützung nötig. |
||
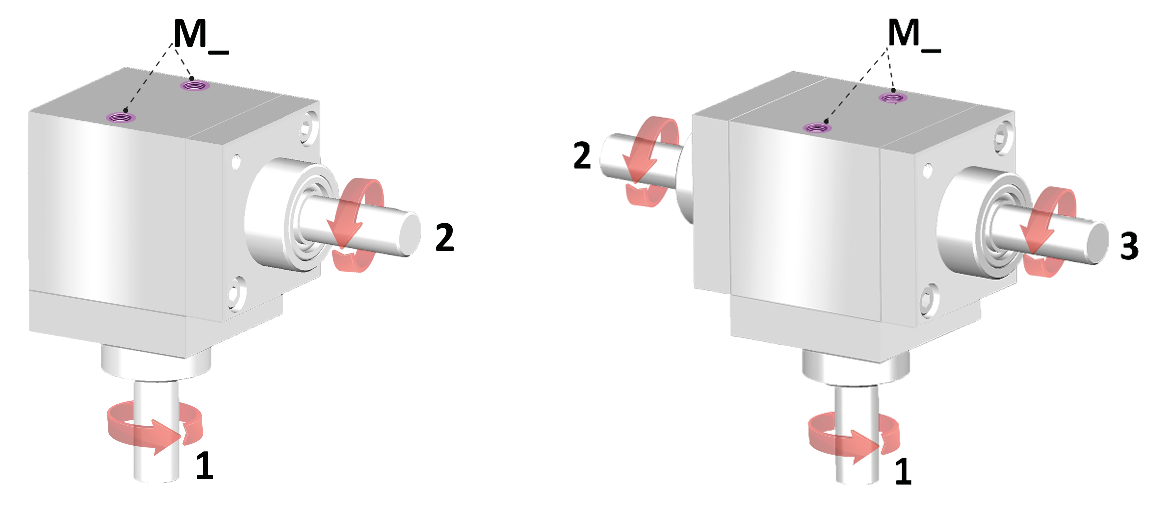
| SCHMIERNIPPEL | ||
|
Winkelgetriebe mit 2 Wellen |
Winkelgetriebe mit 3 Wellen |
|
 |
 |
|
|
Empfohlen bei Arbeitsbedingungen die, die Werte überschreiten, zur Lebensdauerverlängerung oder bei schwer zugänglichen Stellen. Schmiermittel in variablen Abständen nachfüllen (Technische Abteilung konsultieren). Standardposition gezeigt; alternative auf Anfrage. |
||




KUPPLUNGSBÜCHSEN
mit Schnitt, zur Kupplung mit Winkelgetrieben und flexiblen Wellen.
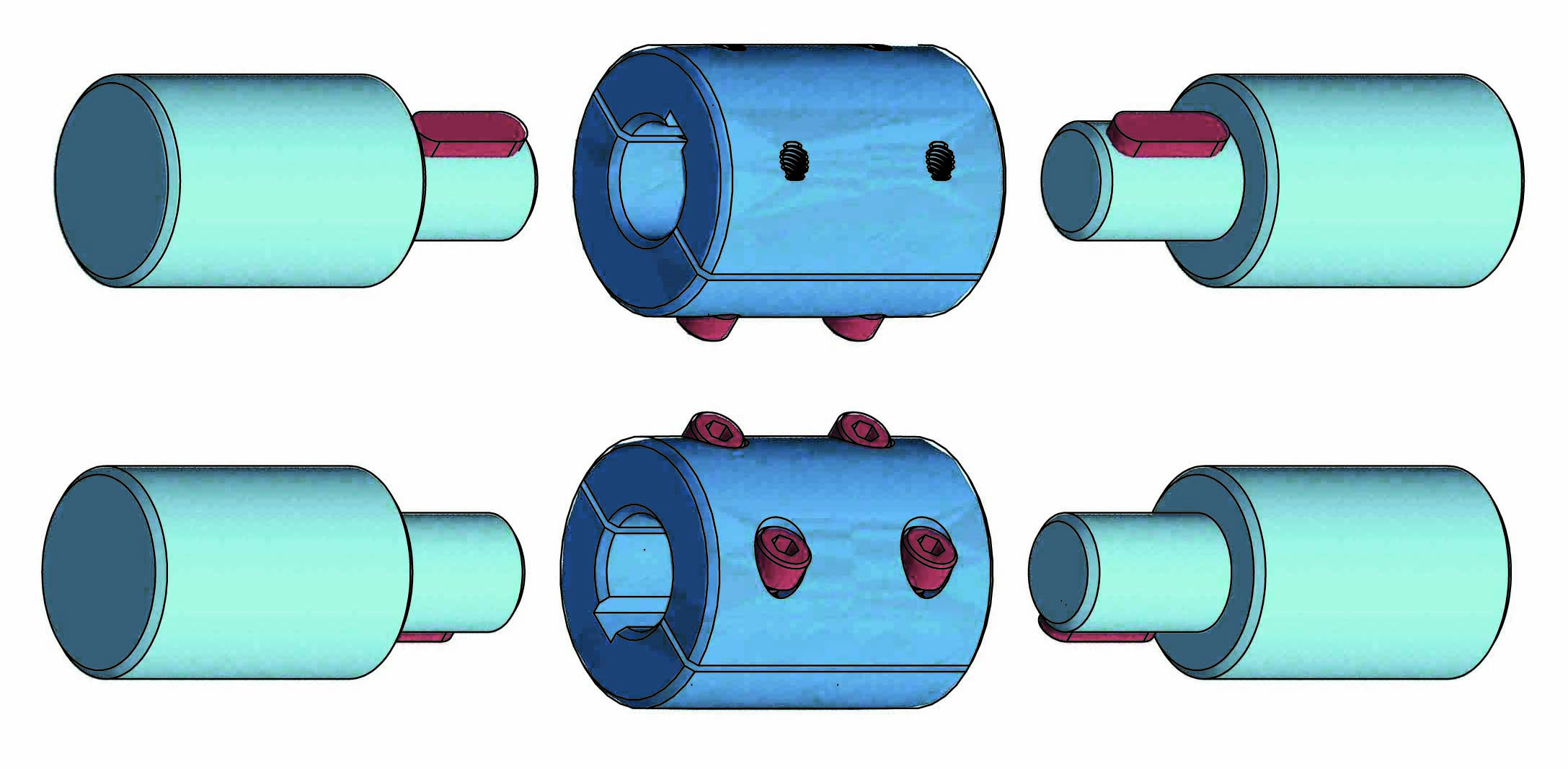
Lieferbare Bohrungen Ø: 6 - 8 -10 -14.
➜ Weitere Informationen finden Sie in BT
Lagerböcke in Aluminium (mit quadratischen Flanschen), mit O-Ring, kugelgelagert. Lieferbare Vollwellen Ø6, Ø8, Ø10, Ø14, Ø20.
➜ Weitere Informationen finden Sie in Lagerböcke
Lagerböcke mit Flansche mit Verlängerungswelle zur Kupplung mit Positionsanzeigen.
➜ Weitere Informationen finden Sie in Lagerböcke mit Flansche
Richiedi l'accesso
| DREHMOMENT MIT ÜBERSETZUNG 1/1 |
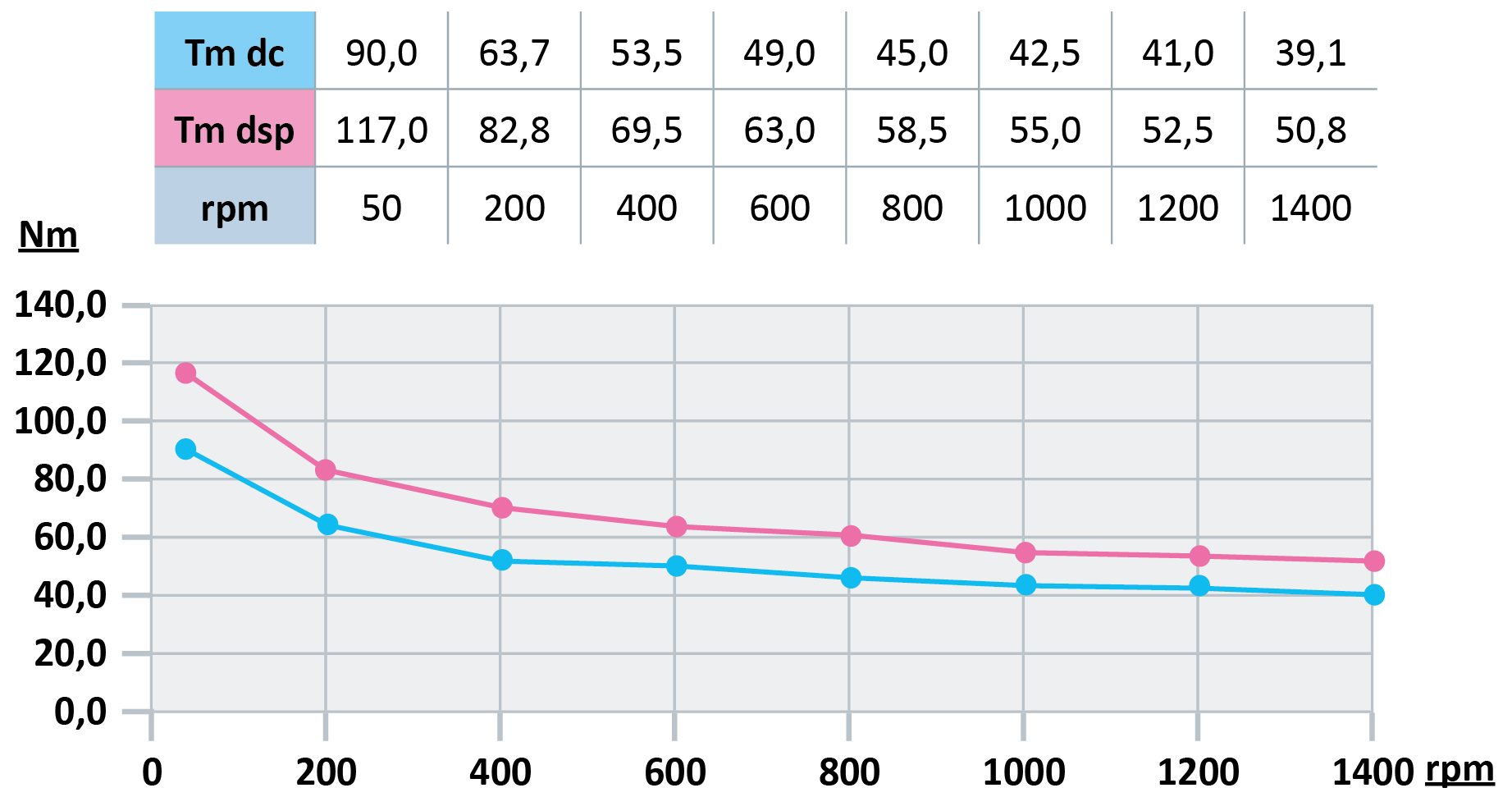
| DREHMOMENT MIT ÜBERSETZUNG 1/2 |

| DREHMOMENT MIT ÜBERSETZUNG 2/1 |

| Leistung = 90% |
| - Tm = maximales Drehmoment in Nm |
| - dc = Kegelverzahnung |
| - dsp = Spiralverzahnung |




