RINV-OP64
Winkelgetriebe mit Flansche
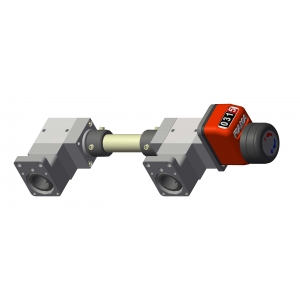
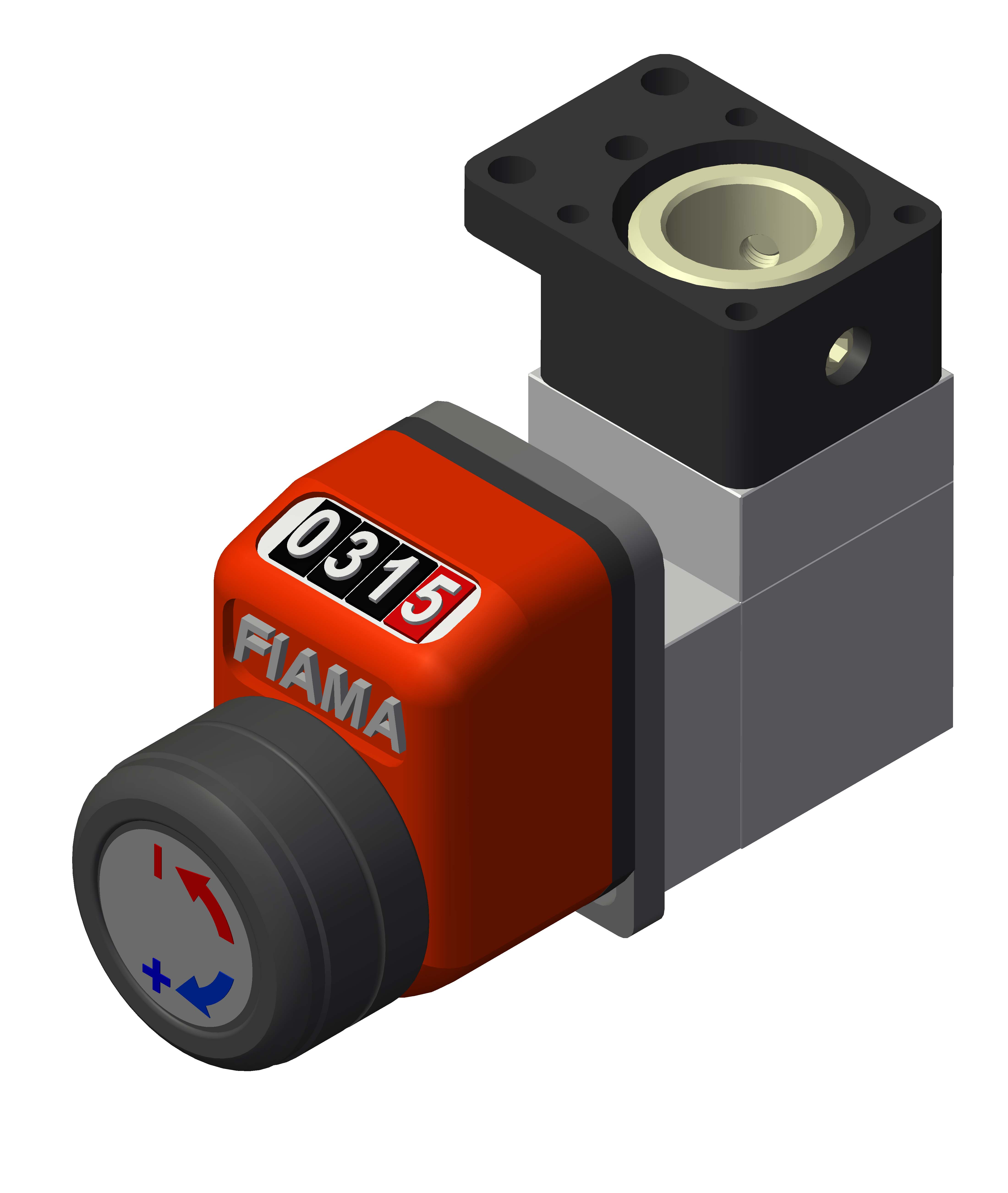
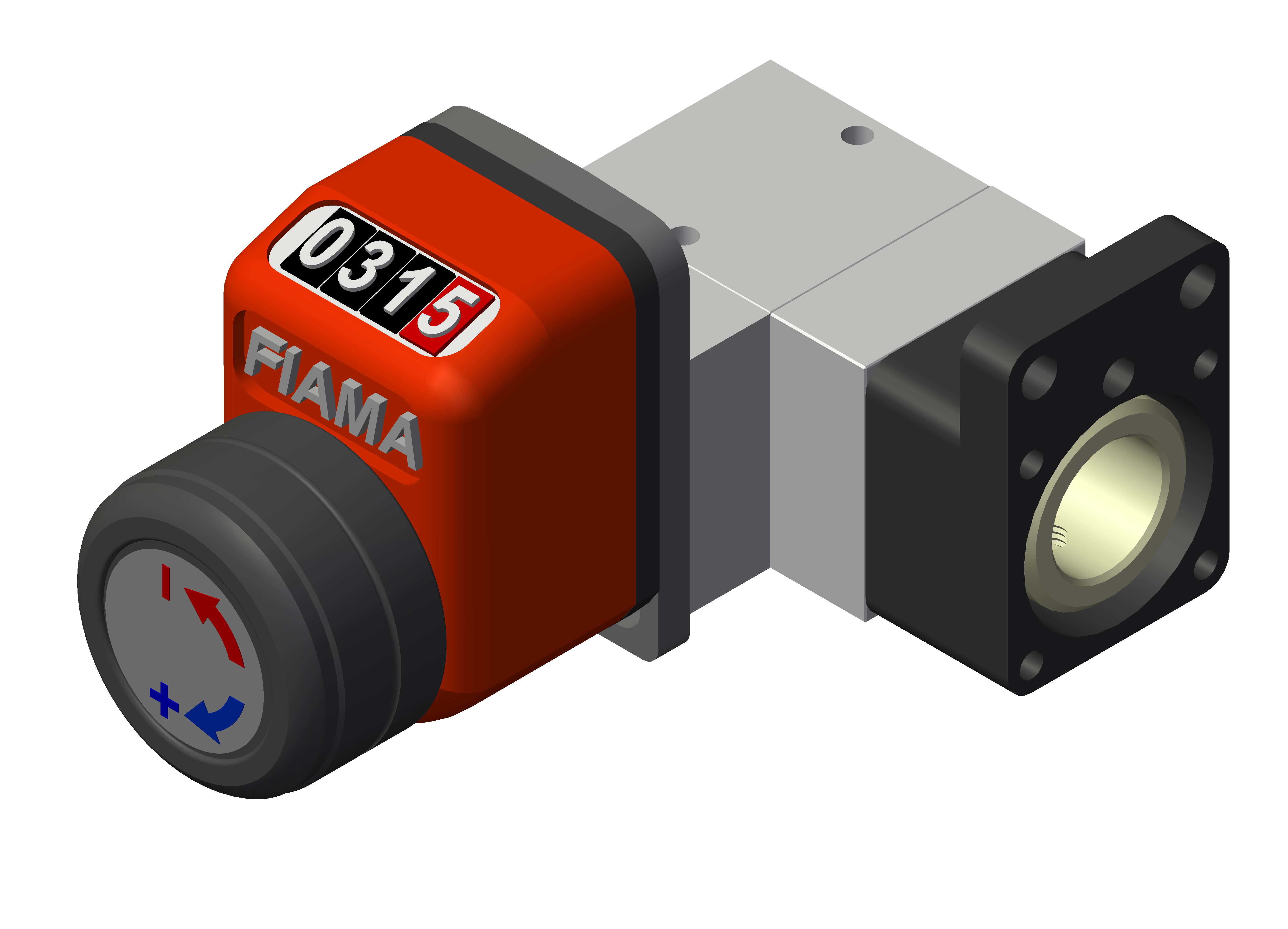
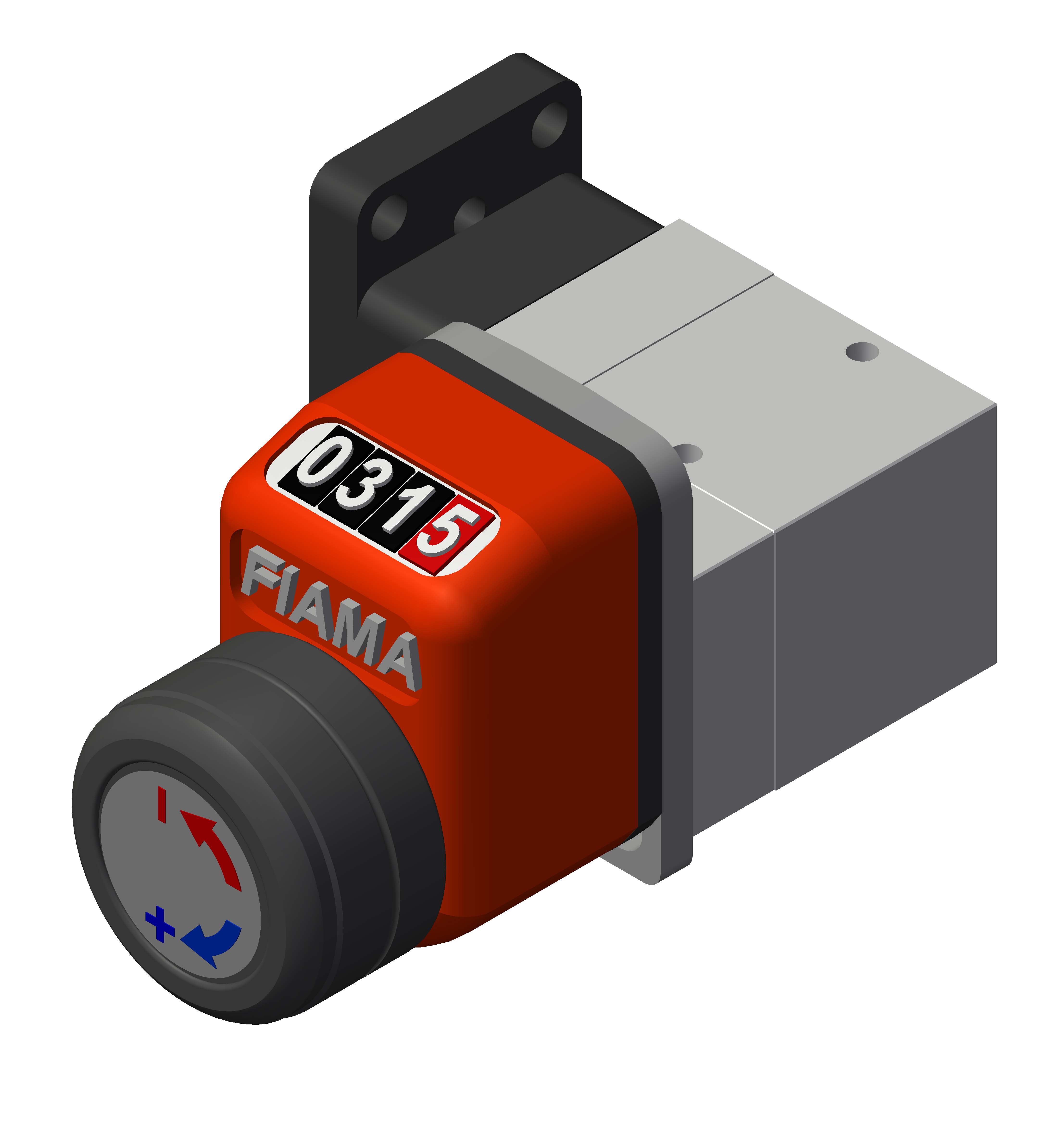
Das RINV-OP64 ist ein Winkelgetrieb mit Flansche das, mit Positionsanzeige Typ “OP” kombiniert, erlaubt eine sichtbare linear- oder winkel- Regulierung, auch wo die Welle in einer unbequemen Position ist.
• Verschiedene Ansicht und Anschluss Möglichkeiten.
• Lieferbar mit Untersetzungen: 1:1 - 1:2.
• Max. Ausgangsdrehmoment 6 Nm.
• Druckgussgehäuse eloxiert. Stahlwellen, gehärtete Kegelradgetriebe aus Stahl.
• Minimales Winkel- und Axialspiel.
• Kugelgelagert, wasserdicht.
• Radiallast 15 kg - Axiallast 1,5 kg
• Gewicht gr. 300.
Fotogalerie





| RINV-OP64 |
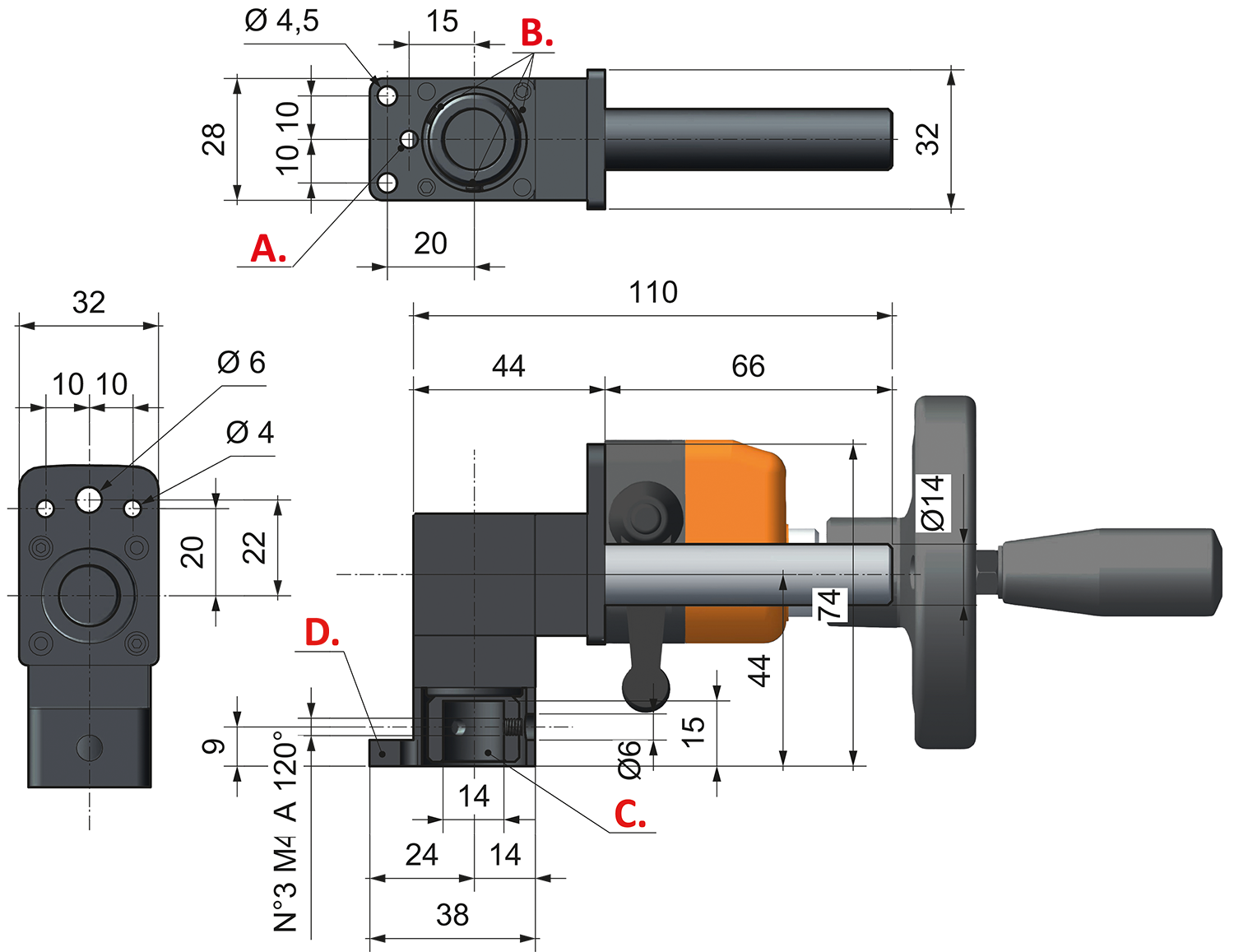 |
| A. Antirotationsbohrung Ø4 |
| B. 3 Gewindestifte M4 auf 120° |
| C. Hohlwelle Ø14x15 |
| D. Befestigungsflansche für Kegelradgetrieb |
| BEISPIELE VON EINBAULAGEN | |||
 |
 |
||
 |
 |
||
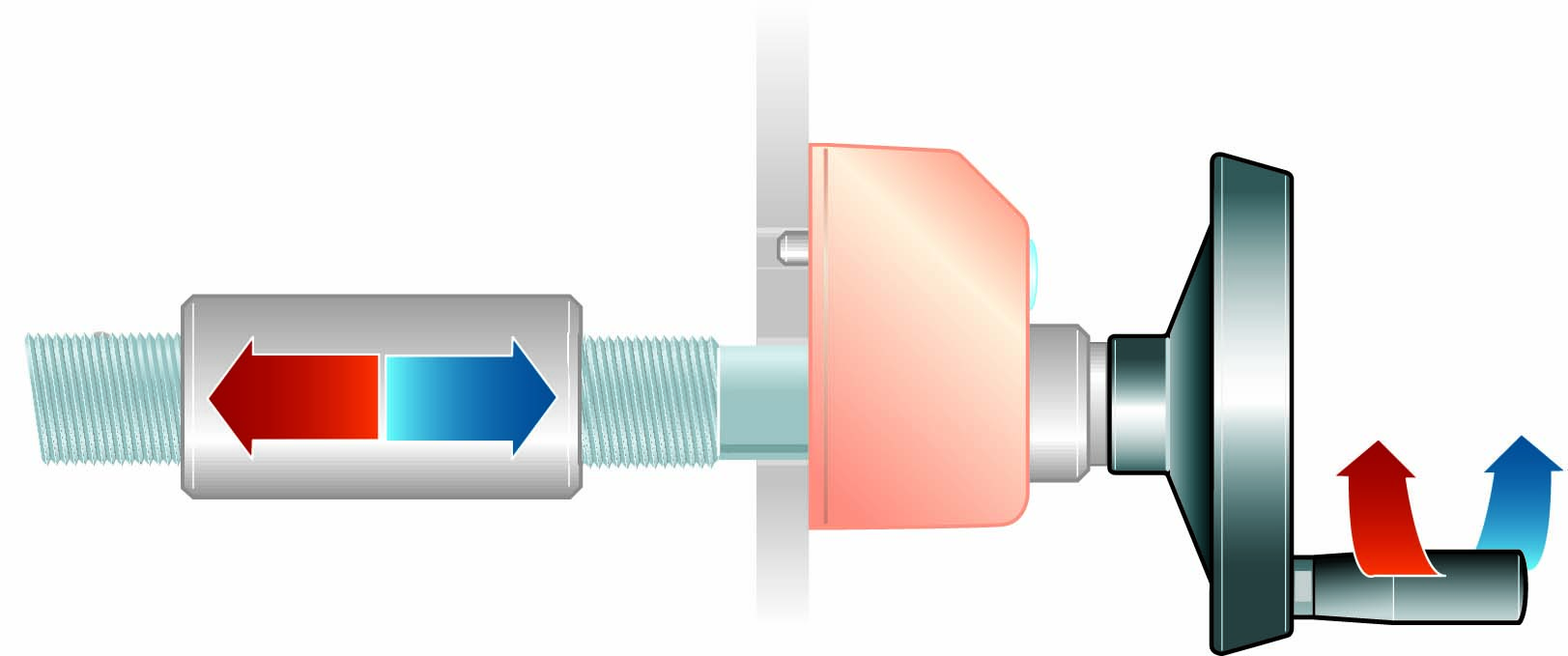
| Das RINV-OP wird Standard wie nach Abmessungszeichnung geliefert. Um die Einbaulage der zwei Flanschen (OP-Flansche und Befestigungsflansche RINV-OP) zu ändern, die zwei Schrauben entfernen, die Flansche in die gewünschte Position drehen und die Schrauben wieder befestigen. Die Machinen-Welle Ø14 in die Hohlwelle von RINV-OP einführen, die Drehmomentstütze Ø4 im feststehenden Teil von der Maschine, dann besfesti- gen mit Gewindestifte M4 durch die Bohrung in der Flansche. |
|||




Handrad mit Umlegegriff, thermoplastisches Material mit Stahl-Büchse.
➜ Weitere Informationen finden Sie in V.R

Kurbel mit Umlegegriff, thermoplastisches Material mit Stahl-Büchse.
➜ Weitere Informationen finden Sie in V.M


Mit Wellenklemmflansch an den Positionsanzeigen OP2, OP3, OP6, OP7, OP5 oder OP9, als kompakte Einheit, erhalten wir eine sichere Klemmung der Welle.
➜ Weitere Informationen finden Sie in FL-B


• Zähler mit 4 Ziffern (Standard rote Ziffer für Zehntel; auf Anfrage 2 rote Ziffer für Hundertstel oder 4 schwarze Ziffer für mm). Ablesung bis 9999. Ziffernhöhe 5mm.
• Standardbohrung ø14 H7; kleinere Bohrungen mit Reduzierbüchse.
➜ Weitere Informationen finden Sie in OP3
Fotogalerie





Richiedi l'accesso
| DARSTELLUNG VON UNTERSETZUNG UND ÜBERSETZUNG | ||||
| Beispiel | ||||
|
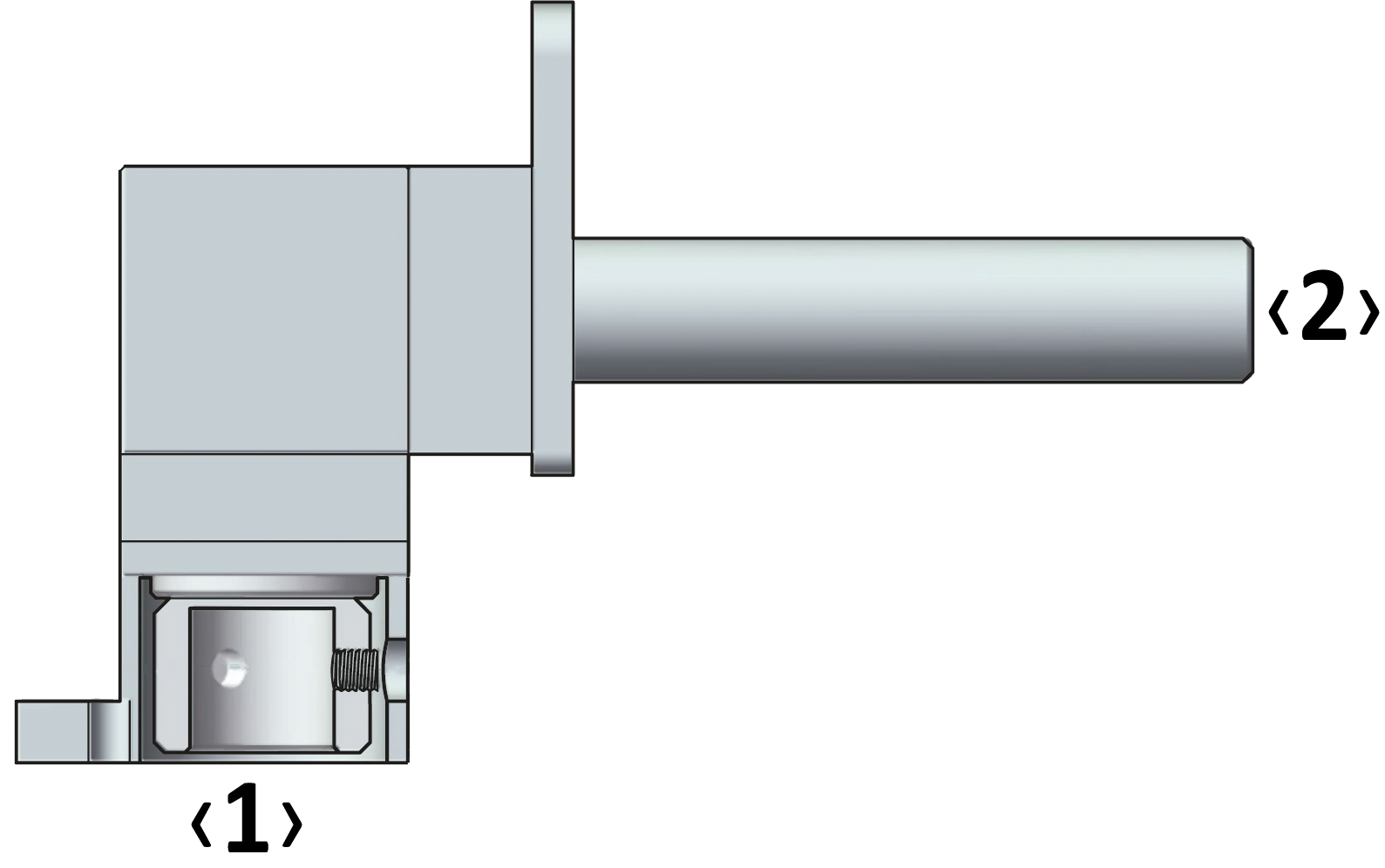
Übersetzung 1:2 ---------------------------------- |
 |
|||
|
‹1› = Maschinenseite |
||||
|
Für die Angabe der Übersetzung ist die Welle ‹1› maßgebend. |
||||
| RADIAL- UND AXIALBELASTUNG | ||
| Fig. 8 | ||
 |
Fr = max 150 N Radiallast, die Belastung wirkt senkrecht aud die Welle/Achse | |
|
Fa = max 15 N Axiallast, die Belastung wirk waagerecht auf die Welle/Achse |
||
| T = 4 Nm Drehmoment | ||
| Die auf die Wellen einwirkenden Belastungen können von zwei Arten sein, im Bezug auf die Achse der Welle (Fig. 8): Fr - radial Stärke Fa - axial Stärke, diese kann in 'Zug oder Druck' sein (bei Bestellung angeben). «Die Belastungen werden von den, an den Winkelgetrieb, verbundenen Geräte erzeugt und haben sämtliche Ursachen, wie beispielsweisewie Bandaufnahmen, Beschleunigungen und Verlangsamungen, Versetzungen in der Struktur, Vibrationen, Stöße verursacht werden, usw.» |
| DREHMOMENT MIT ÜBERSETZUNG 1/1 |

| Leistung = 90% |
| DREHMOMENT MIT ÜBERSETZUNG 1/2 |

| Leistung = 90% |
| DREHMOMENT MIT ÜBERSETZUNG 2/1 |

| Leistung = 90% |
RINV-OP64 

Zum Herunterladen hier anklicken
RINV-OP64 

Zum Herunterladen hier anklicken
RINV-OP64 
Zum Herunterladen hier anklicken