PR20
Potentiometrische Drehgeber
|
PR20 sind potentiometrische Getriebe die eine Drehbewegung in eine widerstandsfähige Variation umwandeln: sie bestehen aus einem Präzision Drehpotentiometer, der durch ein Antriebssystem, die Bewegung von einer Anriebwelle erhalt. |
|
Haupteigenschaften: |
|
• Durchgehende Hohlwelle Bohrung Ø20 mm. |
|
• Selbstlöschendes, stossfestes Gehäuse, widerstandsfähig gegen Lösungsmittel, Benzin, Öl, Fett. |
|
• Präzisions-Drehpotentiometer, das über ein Übertragungssystem mit der Antriebswelle verbunden ist. |
|
• Lieferbar mit Potentiometer mit 1, 3, 5, oder 10 Umdrehungen mit Antriebsübersetzungen zwischen die Antriebswelle und den Potentiometer. |
|
• Potentiometer ist durch eine Ruutschkupplung gegen Überlastungen geschützt. |
|
• Für die Anwendung ist die Umdrehungszahl der Antriebswelle erforderlich, um den Gesamtweg der Maschine zu erfassen (siehe Steigungstabelle). |
|
Lieferbare Ausführungen: |
|
• PR20: Kabelausgang. |
|
• PR20C: Steckerausgang. |
|
• PR20-I: integrierte analoge Schnittstelle, 24V DC Spannung, 4-20mA Ausgang. |
|
• PR20-V: integrierte analoge Schnittstelle, 24V Spannung, 0-10V Ausgang. |
|
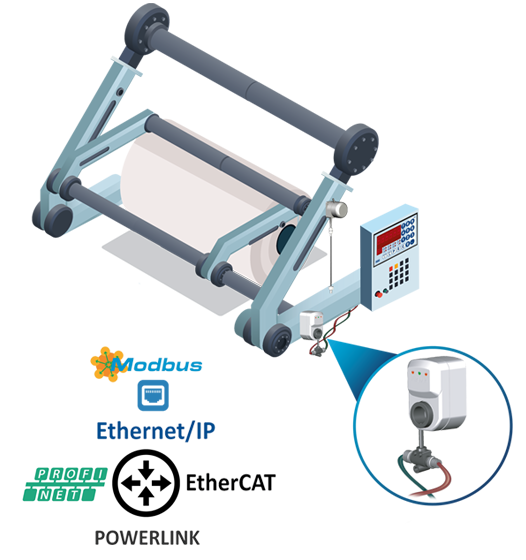
• PR20-RS485: RS485 Modbus RTU Schnittstelle für Positions- und Diagnosedaten zur SPS. Anpassbare Status-LEDs (rot/grün). Protokolle: Profinet, EthernetIP, Powerlink, EtherCAT (via Gateway PR20). |
|
Anwendungen: |
|
• Die Kombination mit einem Display (V4P, P3X) erhalten Sie ein günstiges, einfaches und leistungsfähiges System für die Messung der Umstellung an Werkzeug-, Automatik-, Holz-, Stein-, Glas-Bearbeitungsmaschinen usw., mit Präzision bis ±0,1mm. |
Fotogalerie



| ANWENDUNGSBEISPIELE |
|
Schwenkarm-Winkelpositionssteuerung |
|
Lineare Achsen-Positionssteuerung |

| PR20 |
 |
| 1. Drehmomentstütze |
| 2. Gewindestift |
| 3. Befestigungsbohrungen |
| PR20C |
 |
| 1. Drehmomentstütze |
| 2. Gewindestift |
| 3. Befestigungsbohrungen |
PR20C: 4 Polen-Stecker
PR20RS:
2 M Kabel, andere auf Anfrage;
M12x1: 4 Polen-Stecker;
Splitter M12T: 4 Polen-Stecker + 4 Büchse;
Splitter M12Y: 4 Büchse + 4 Büchse
1080° ±10°
1800° ±10°
3600° ±10°
Untersetzung: 1/1 - 3,3/1 - 10/1 - 12/1 - 18/1 - 24/1 - 30/1 - 54/1 - 72/1 - 90/1






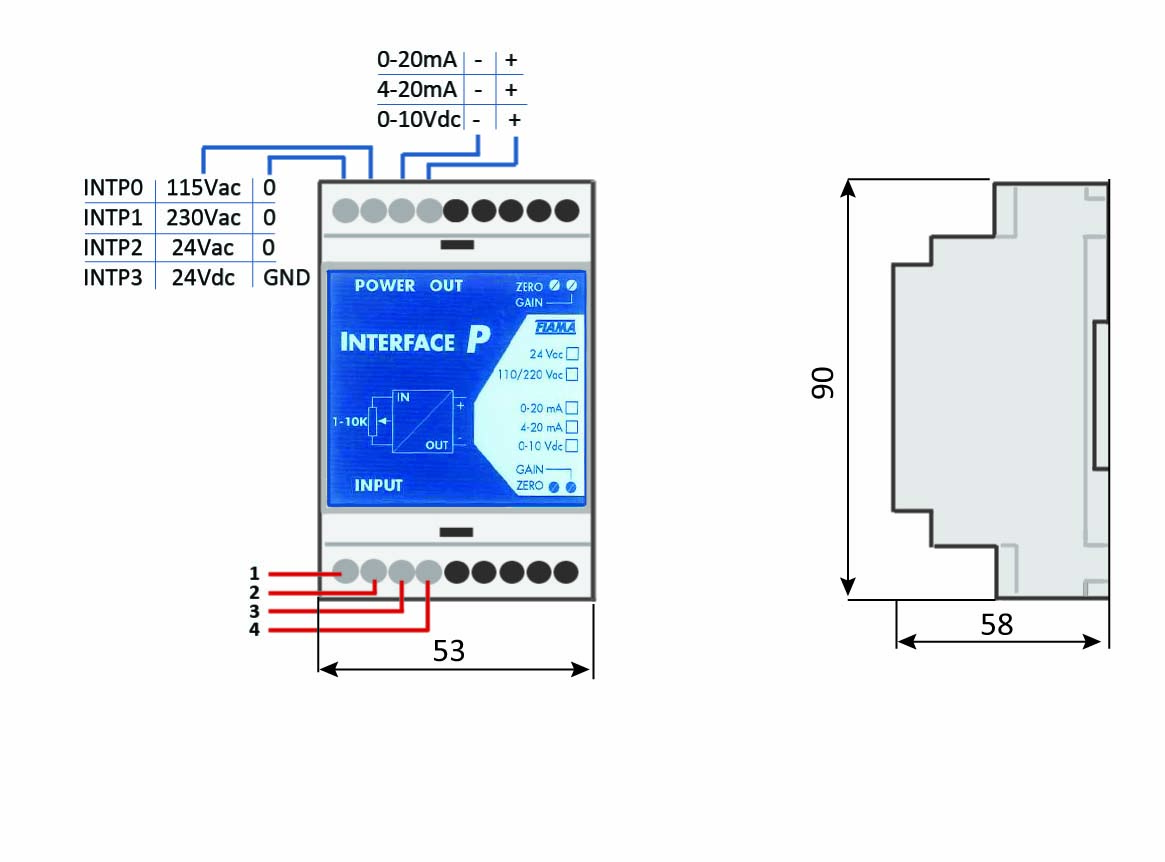
Die Interface P wandelt das von einem potentiometrischen Getrieb gelieferte Signal in Strom 0-20 mA, 4-20 mA oder in eine Spannung von 0-10 Vdc um.
Die Standardverwendung gilt für die Strom- oder Spannungsübertragung eines von einem fernen potentiometrischen Getrieb gelieferten Signals bei Fernüberwachungs-Systeme.
Zu den wichtigen Eigenschaften des Interface Pgehört der niedrige Preis und die einfache Programmierung: von zwei Trimmern kann dergesamte Ausgangsbereich mit dem tatsächlich verwendeten Potentiometerweg in Beziehung gebracht werden.
Das Gerät ist in ein Gehäuse in der Größe von 3 Modulen zur Montage auf Schienen DIN EN50022 eingelassen.
| AUSFÜHRUNGEN | |
| INTP0 | Spannung 115Vac |
| INTP1 | Spannung 230Vac |
| INTP2 | Spannung 24Vac |
| INTP3 | Spannung 24Vdc |
| TECHNISCHE EIGENSCHAFTEN | |
| Anzeigeauflösung | 12 Bit |
| Ausgänge | 0÷10 Vdc; 4÷20mA; 0÷20mA |
| Betriebstemperatur | ÷50°C |
| Betriebstemperatur | 1 Mohm |
| Linearität | endlos |
| Max. Widerstandsbelastung für Stromübertragung | 600 Ohm |
| Min. Widerstandsbelastung für Spannungsübertragung | 1Kohm |
| Potentiometer input | ÷50 Kohm |
| Relative Feuchtigkeit | 10 ÷ 90 % |
| Spannung | 115Vac, 230Vac, 24Vac, 24Vdc 3VA |
| EMC | 2014/30/UE |
|
RoHS |
2011/65/UE |
| ABMESSUNGEN |
 |

Die Messanzeigen der Serie V_P sind Mikroprozessor gesteuerte Universalanzeigen mit Potentiometereingang zur Weg- und Winkelmessung.
• V4P: Der Messwert kann mit bis zu 3 Grenzwertkontakte über Relais und LED´s visualisiert und überwacht werden. Zwei Analogausgänge Spannung 0-10V oder –10 +10V; Strom 4 – 20 mA mit 12 Bit Auflösung. Weitere Schnittstellen seriell RS485 mit MODBUR RTU – Protokoll stehen.
➜ Weitere Informationen finden Sie im Abschnitt V_P

Die Positionsanzeigen von Serie P_X sind Mikroprozessor gesteuerte 1-Achs Positioniereinrichtung mit Relais- oder Analogausgang.
• P3X: verarbeitet Signale von potentiometrischen Positionsgeber linear oder rotativ. Über die 16- keypad mit 6- Funktionsanzeigen sind die Parametrierung und Bedienung der Positionsanzeigen benutzerfreundlich.
➜ Weitere Informationen finden Sie im P_X
Richiedi l'accesso





|
BERECHNUNG DES ÜBERSETZUNGSVERHÄLTNISSE |
|
Zur Präzisionsoptimierung sollte die Kombination aus Übersetzungsfaktor und Potentiometer eine leicht höhere Umdrehungszahl als für den
|
|
PRAKTISCHE BEISPIELE
|
|
Beispiel 1 - Berechnung mit gegebener Umdrehungszahl |
|
Der Wandler muss insgesamt 230 Umdrehungen ausführen, um den gesamten Potentiometerhub abzudecken.
|
|
Beispiel 2 - Berechnung mit gegebener Messweg und Steigung |
|
Eine Spindel mit Steigung 4 mm muss ein Messweg von 550 mm zurücklegen.
|
|
Beispiel 3 - Messung eines Winkelversatzes |
|
Ein Winkelversatz von 105° muss gemessen werden. |
| PR20 - Übersetzung | PR20 - Untersetzung |
|---|---|
|
1/3 |
1/1 |
|
1/2 |
3,3/1 |
|
10/1 |
|
|
12/1 |
|
|
18/1 |
|
|
24/1 |
|
|
30/1 |
|
|
54/1 |
|
|
72/1 |
|
|
90/1 |
|