Schneckenrad-und Spindelhubgetriebe - Allgemeine Informationen

Vielseitige Lösungen für Automatisierung und Robotik: ideal für Heben, Positionieren und Förderlinien in allen Industriebereichen
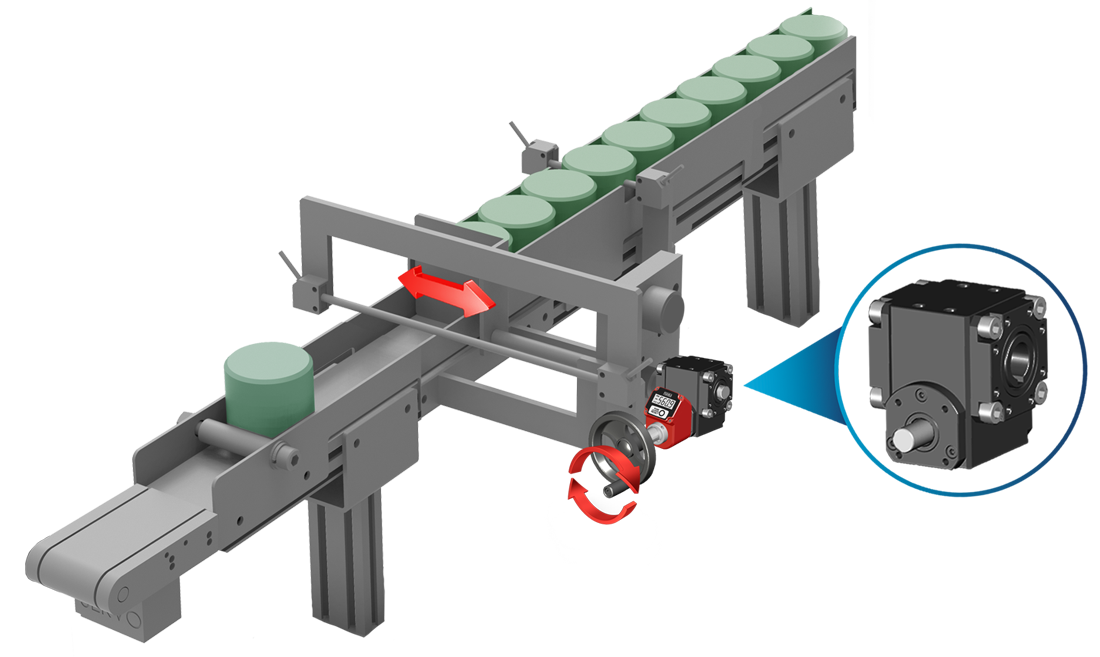
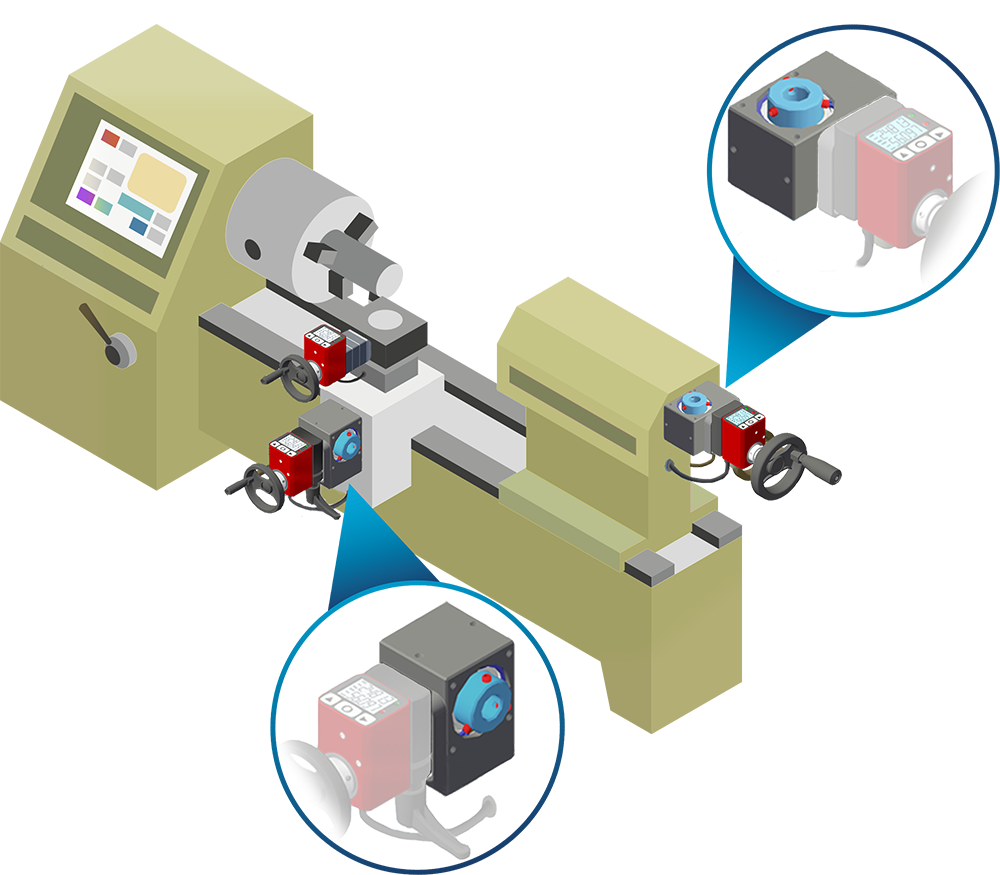
Schneckenradgetriebe – RD-Serie ➜ Übertragung • Reduktion • Präzision
Zur Drehzahlreduzierung und Drehmomentsteigerung ausgelegt, bieten sie hohe Flexibilität für unterschiedlichste Produktgrößen und -anforderungen
– Hauptmerkmale
• 4 Baugrößen: RD26 – RD40 – RD50 – RD60
• Robuste Konstruktion: schwarz eloxiertes Aluminiumgehäuse; gehärtete Stahlwellen, verschleiß- und korrosionsbeständig
• Große Auswahl: verschiedene Übersetzungsverhältnisse und Ausführungen mit männlicher/weiblicher Welle
– Verfügbare Ausführungen
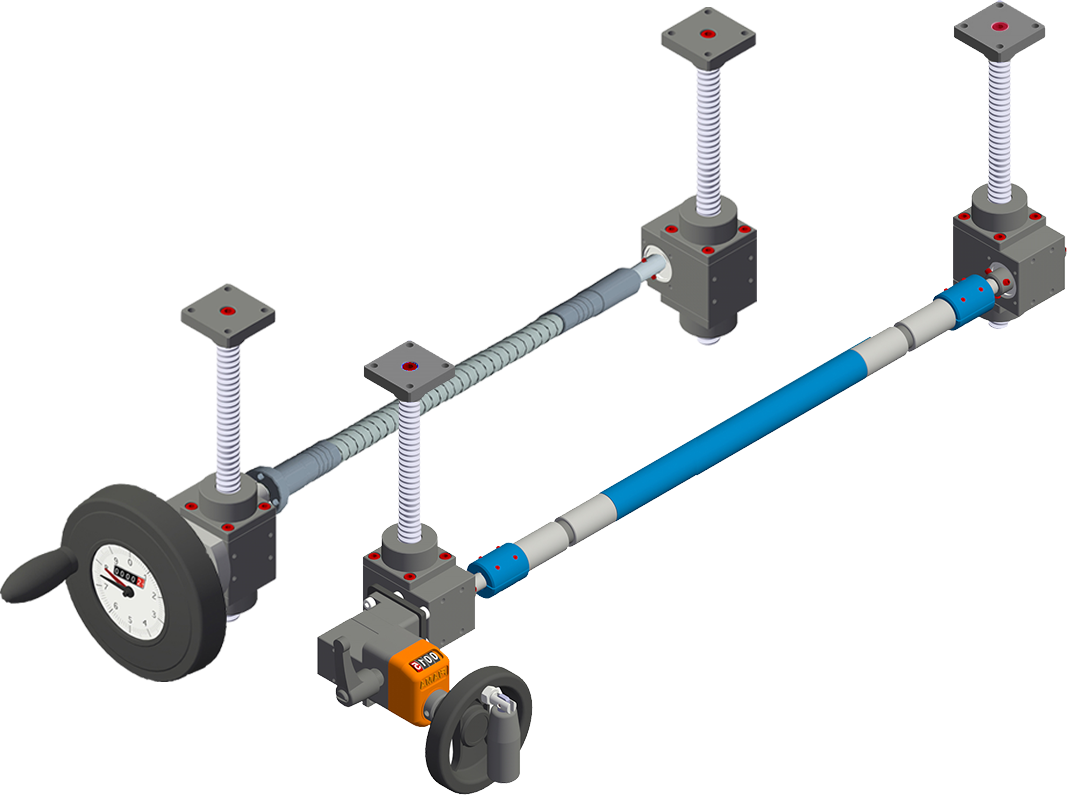
• Flansche + Wellenverlängerungen für OP2 – OP3 – OP7 – EP7 digitale und elektronische Anzeigen
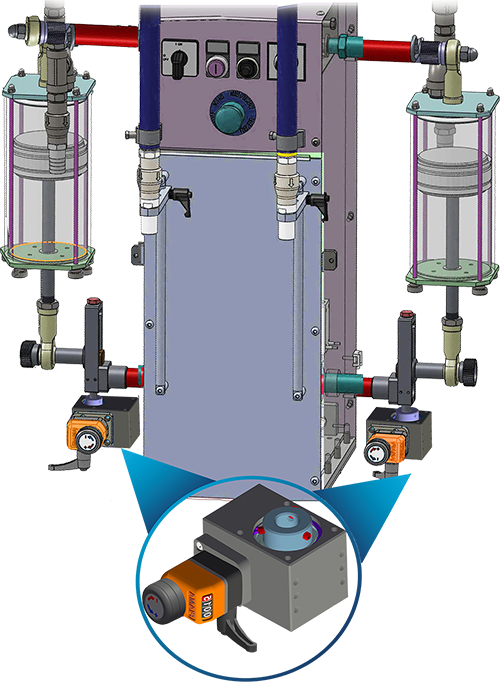
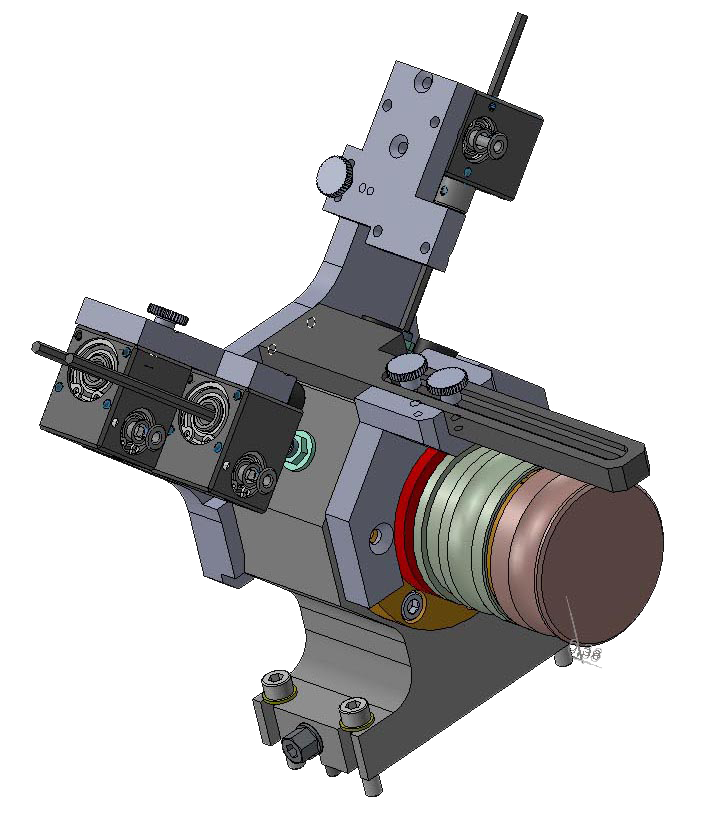
• Modelle mit Magnetsensoren, Kleinmotoren oder Getriebemotoren
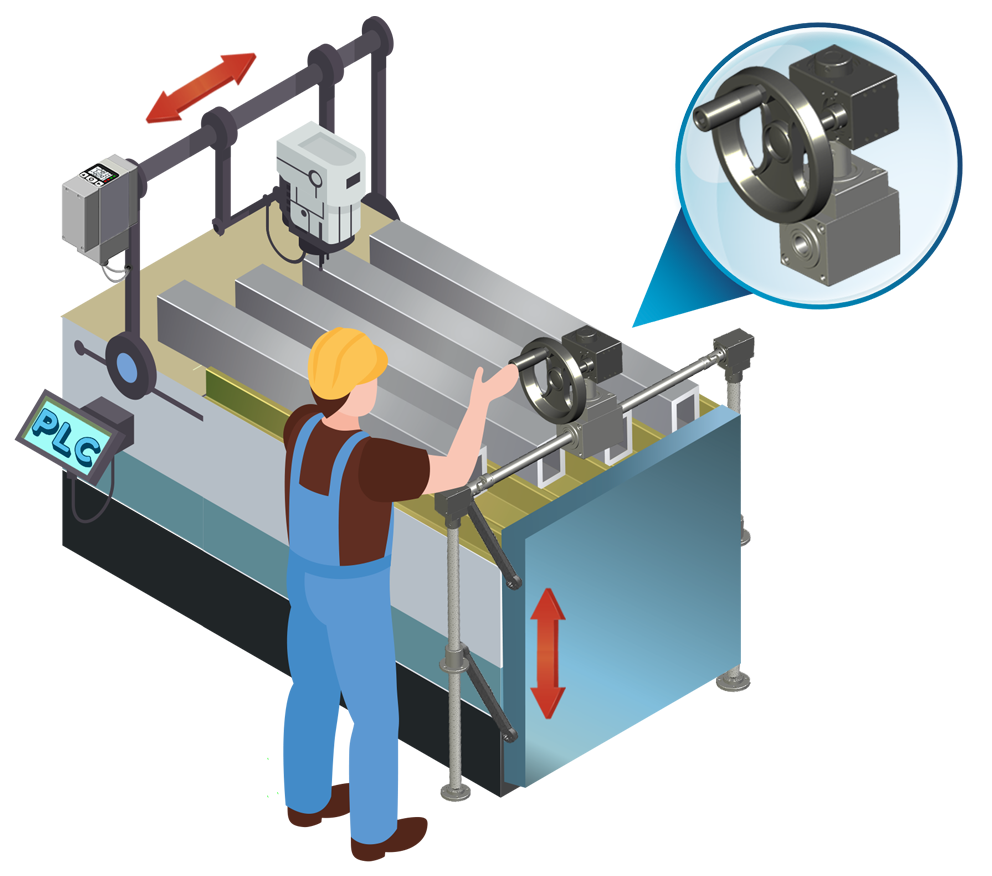
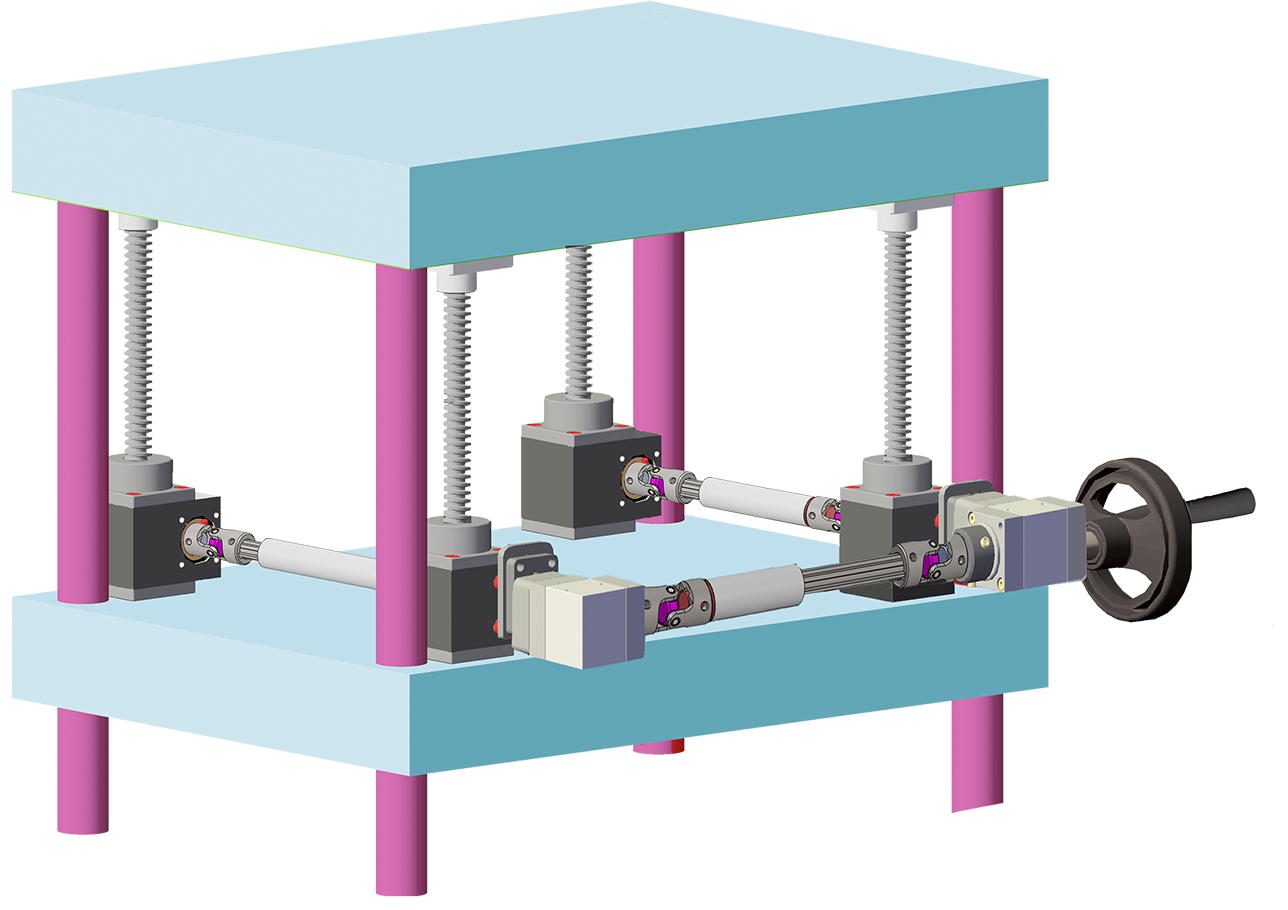
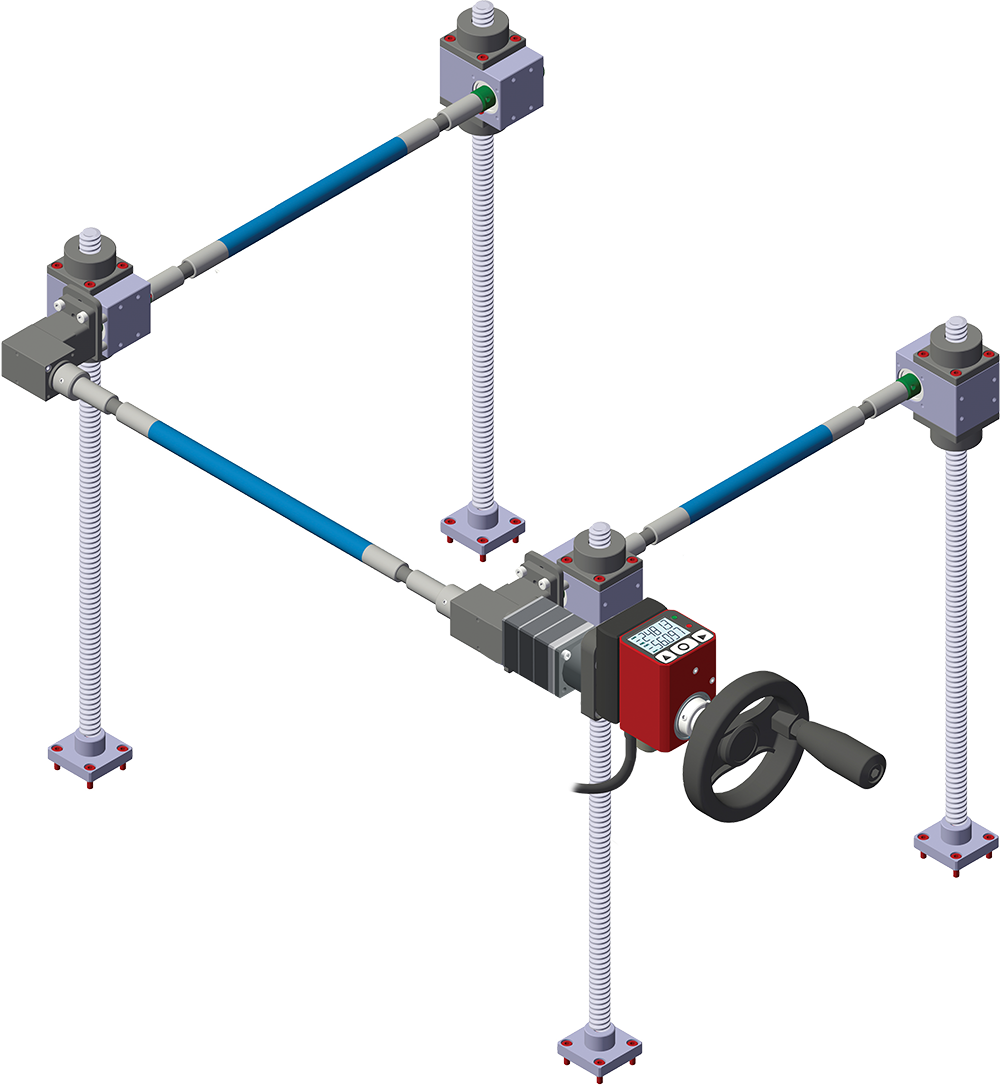
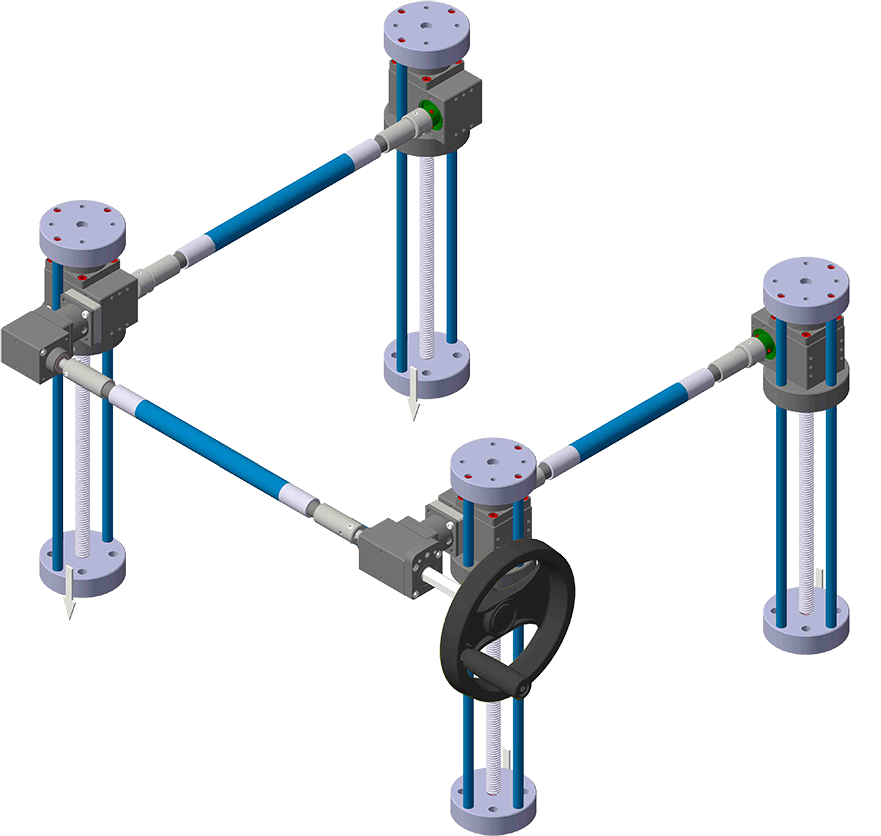
Spindelhubgetriebe – MAR-Serie ➜ Heben • Positionieren • Synchronisieren
Eingesetzt zum Heben, Ziehen, Bewegen, Ausrichten und Positionieren – mit vielseitiger Funktionalität für unterschiedlichste Anforderungen.
– Hauptmerkmale
• 3 Baugrößen: MAR40 – MAR50 – MAR60
• Verfügbare Versionen: selbsttragend und geführt oder mit oberem und unterem Schutz (Aluminium oder Edelstahl)
• Große Auswahl: verschiedene Übersetzungsverhältnisse und Konfigurationen
• Konstruktion: eloxiertes Aluminiumgehäuse; Wellen und Zahnräder aus gehärtetem Stahl; Trapezgewindespindel aus Edelstahl AISI 304
• Betrieb: manuell oder motorisch
• Zubehör und Konfigurationen: Flansche für Kupplungen, Übertragungen, Winkelgetriebe, Motoren und Anzeigen
– Verfügbare Ausführungen
• Selbsttragend und geführt, oder mit oberem und unterem Schutz (Aluminium oder Edelstahl)
• Befestigungsflansch + Wellenverlängerung für OP2 – OP3 – OP7 – EP7 digitale und elektronische Anzeigen
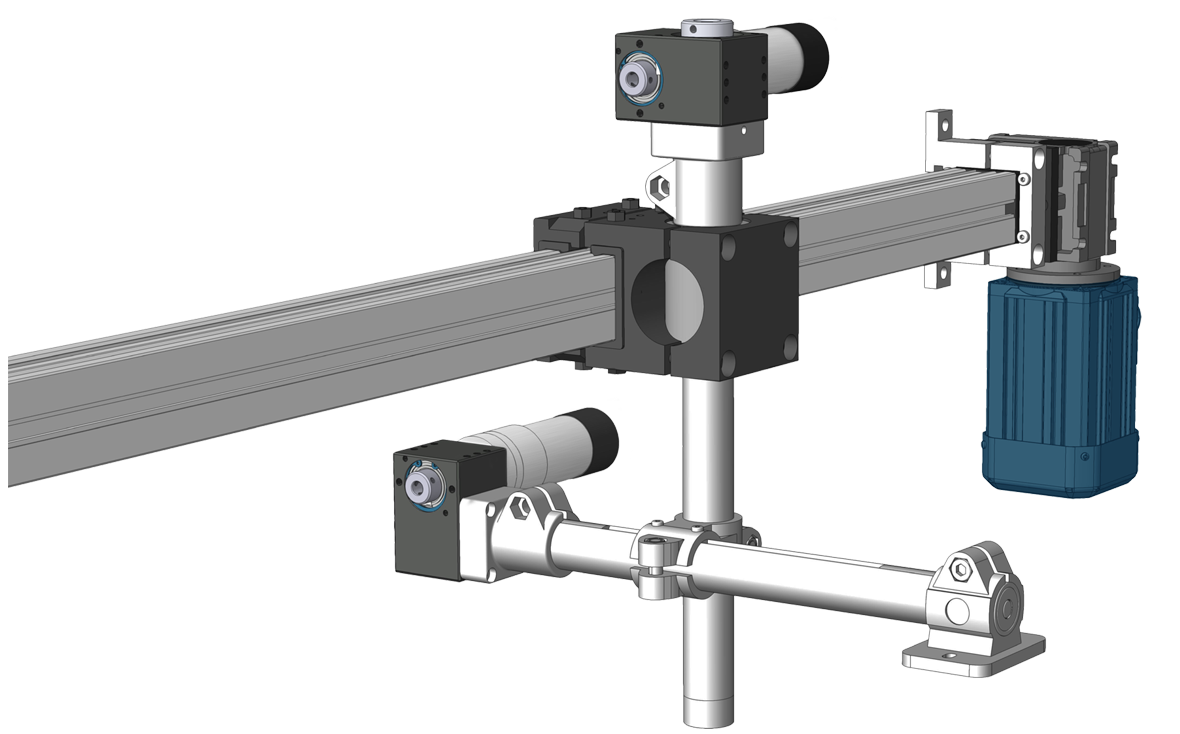
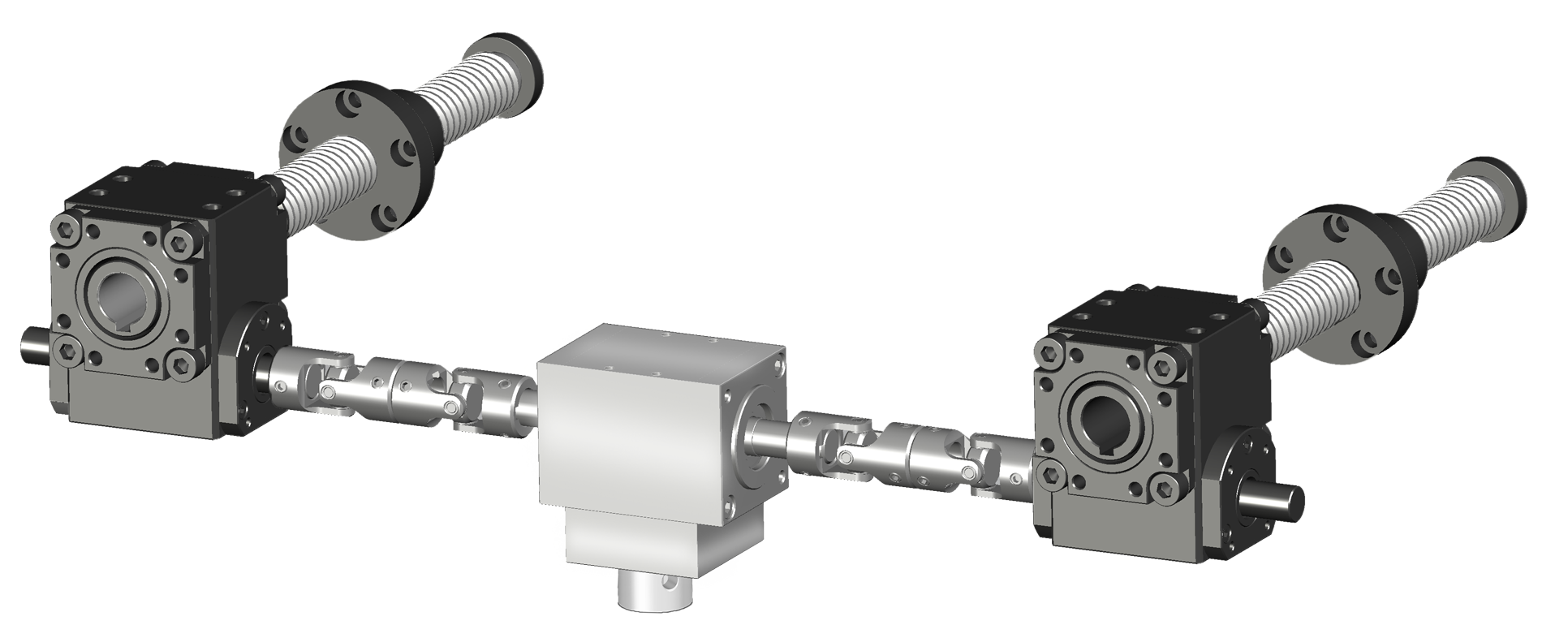
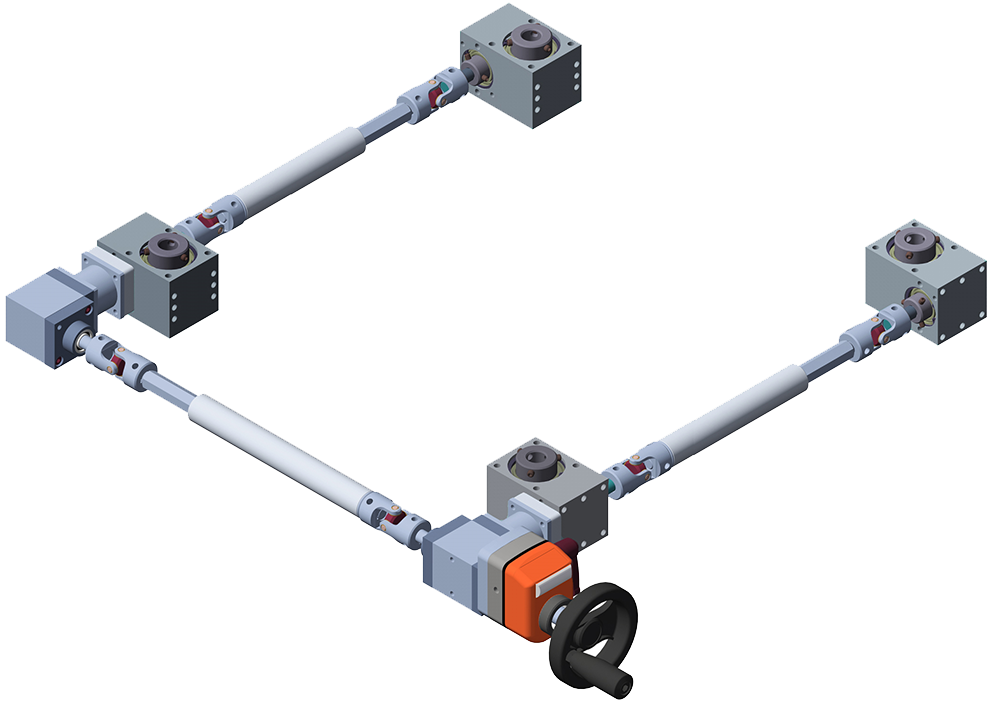
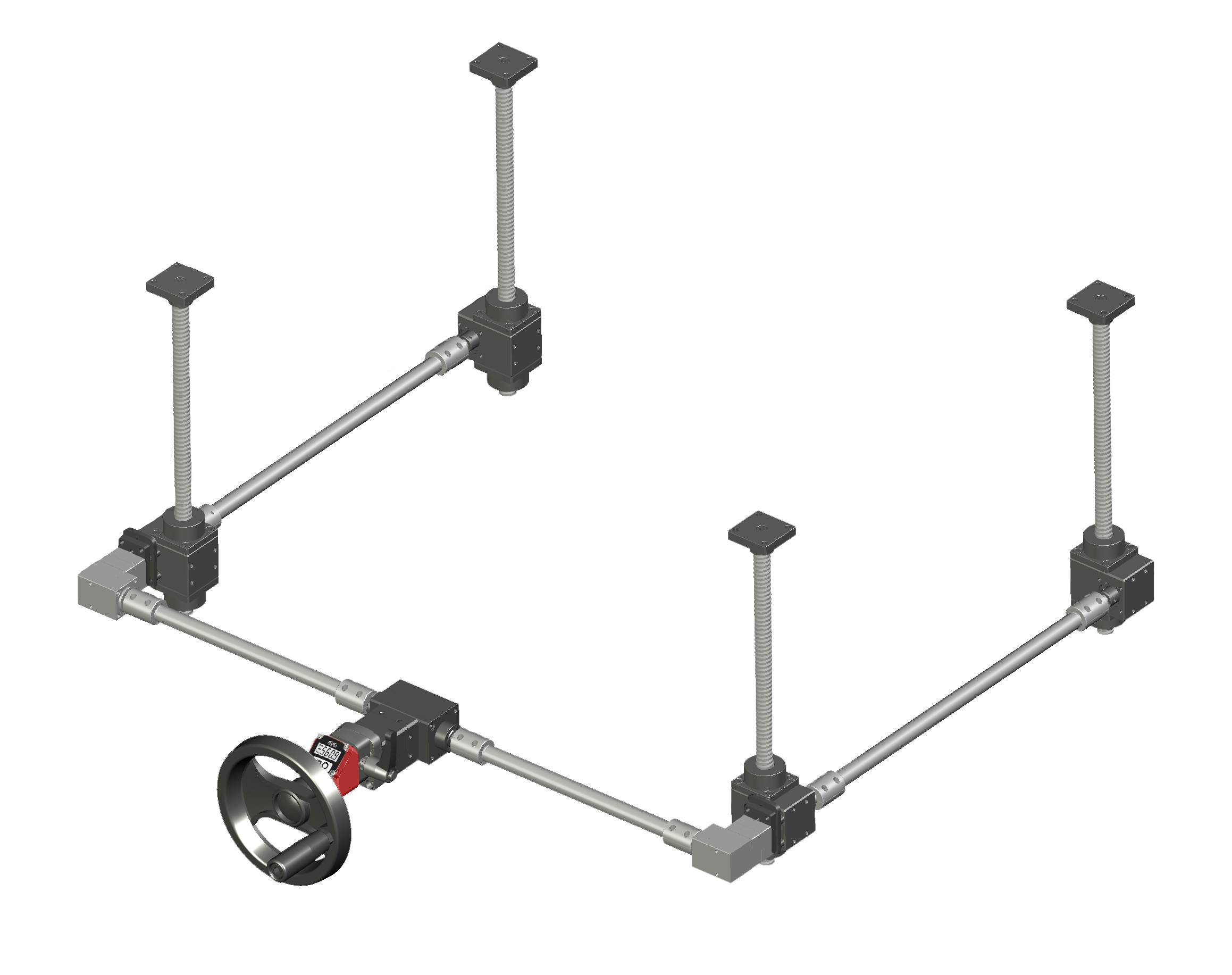
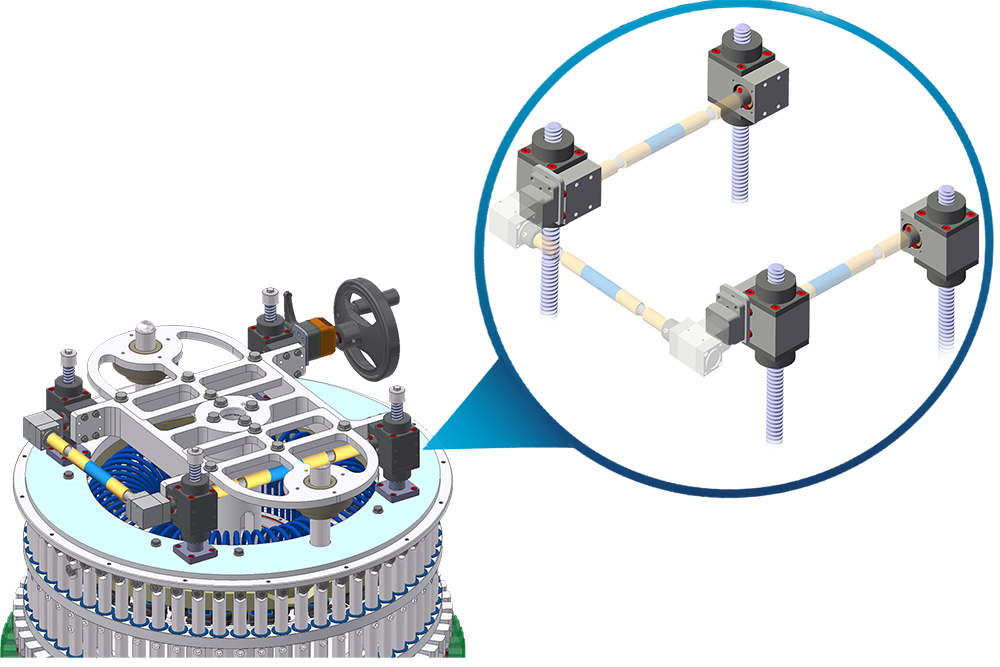
• Modulare Systeme und schlüsselfertige Lösungen: einzeln oder in Gruppen einsetzbar, verbunden über Wellen, Kupplungen und/oder Winkelgetriebe
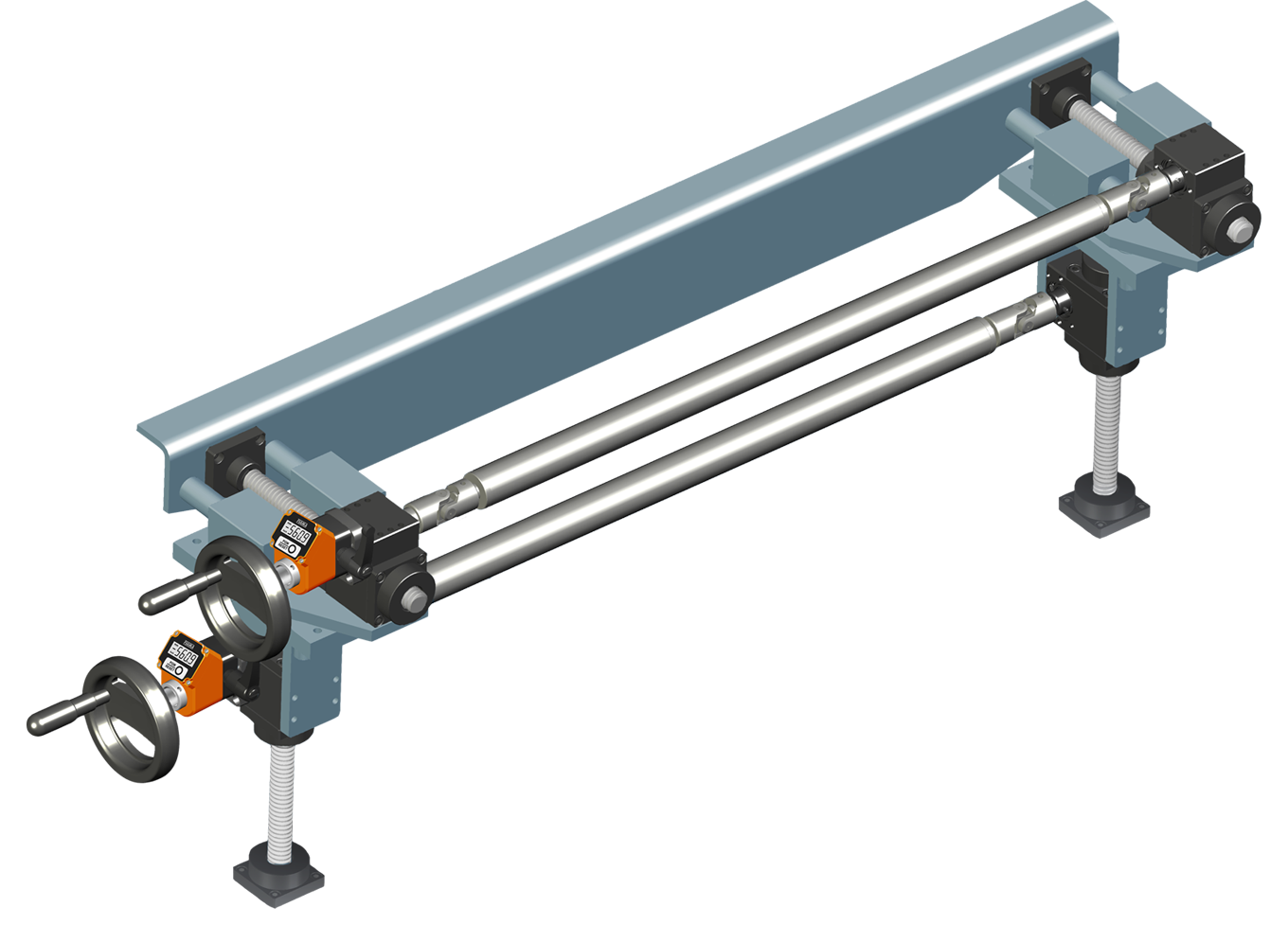
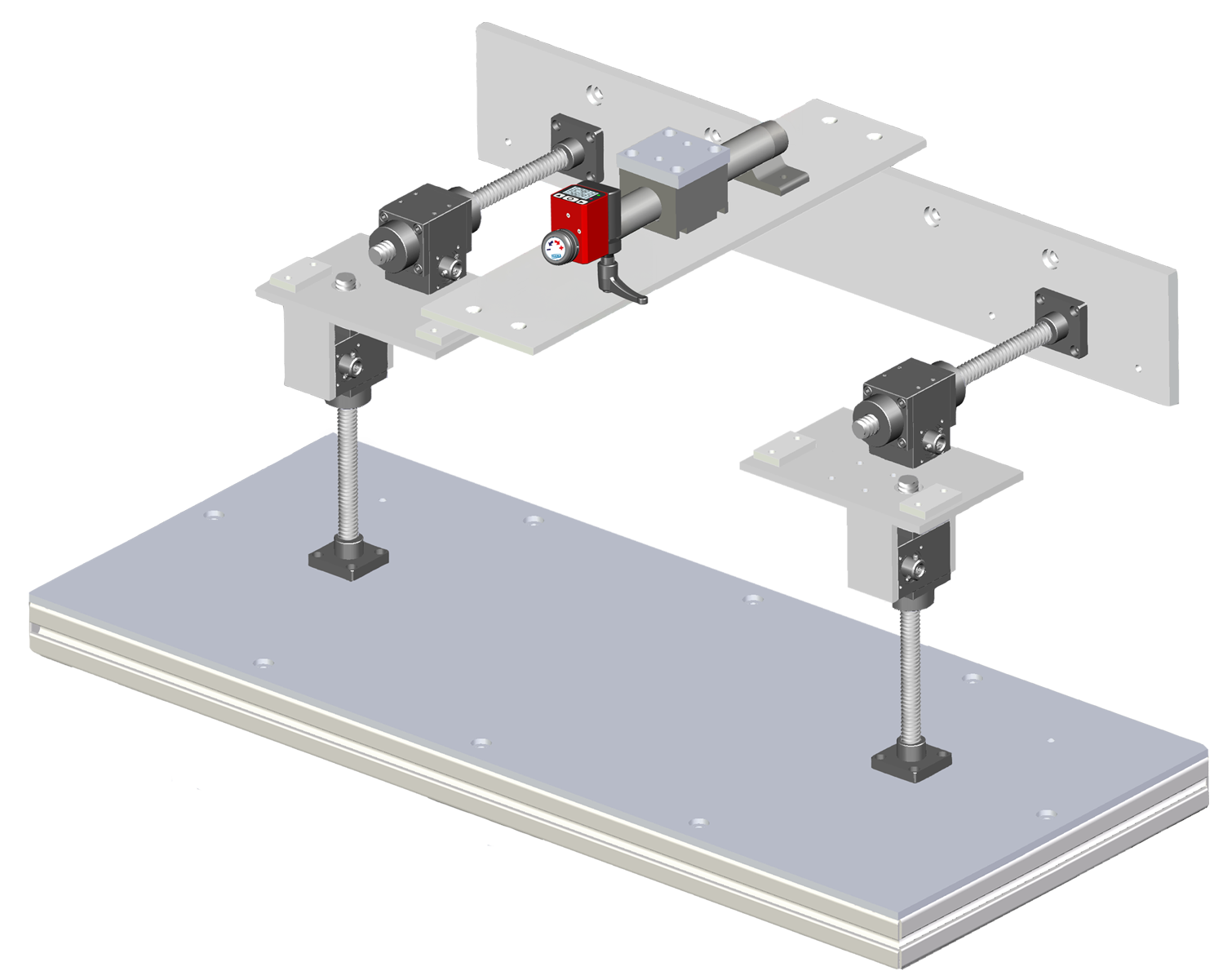
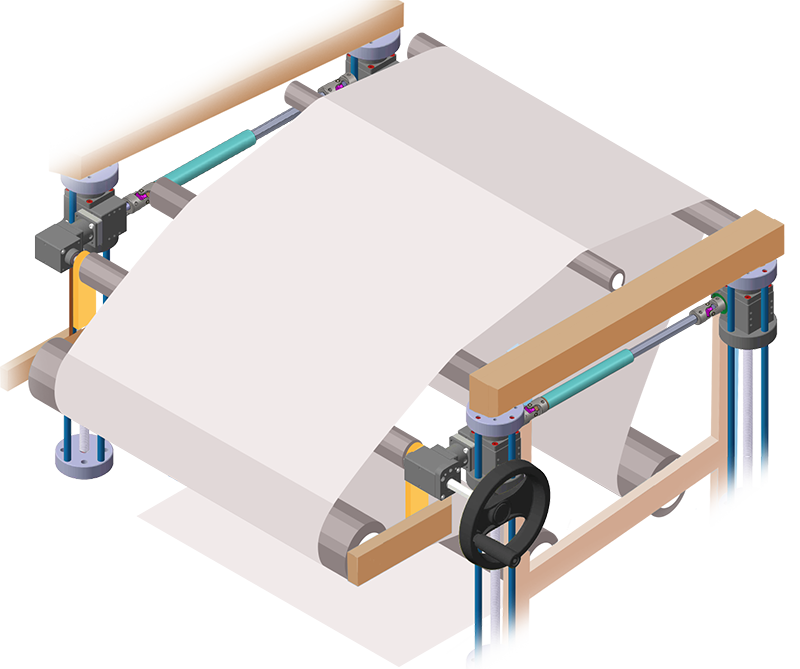
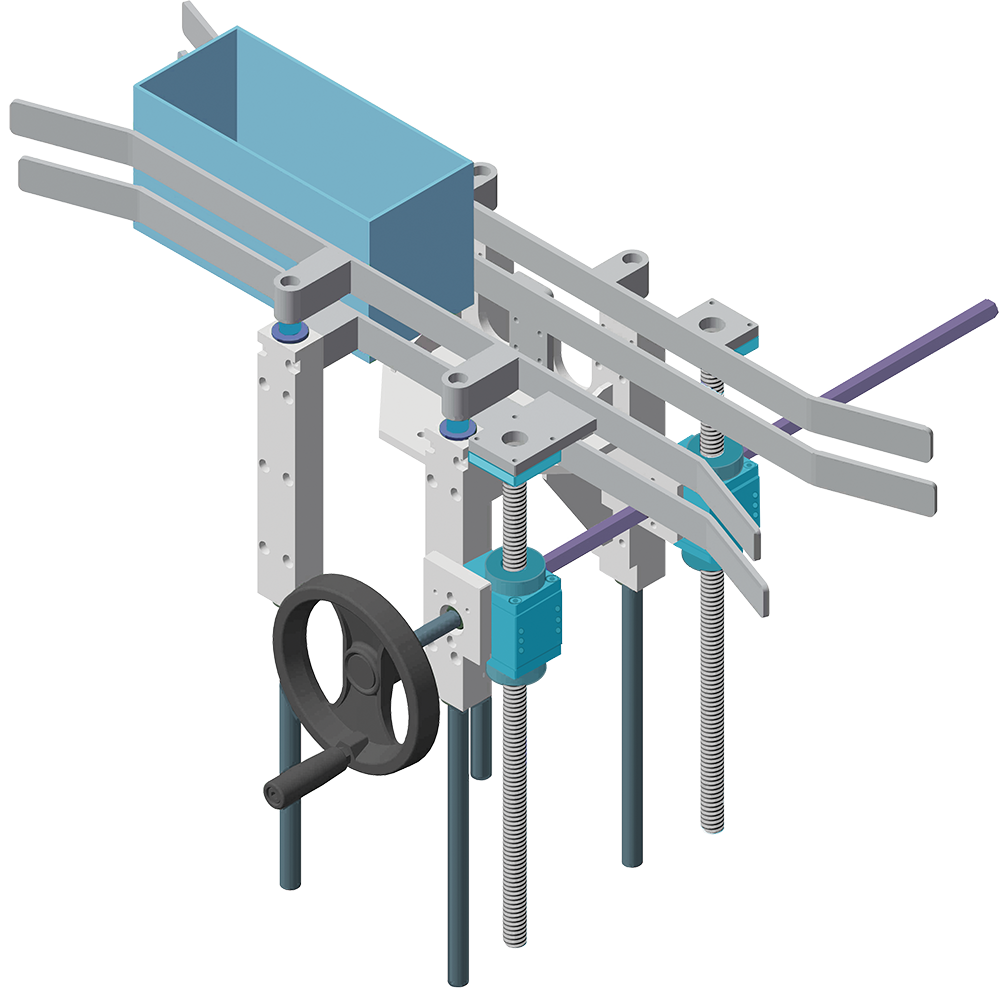
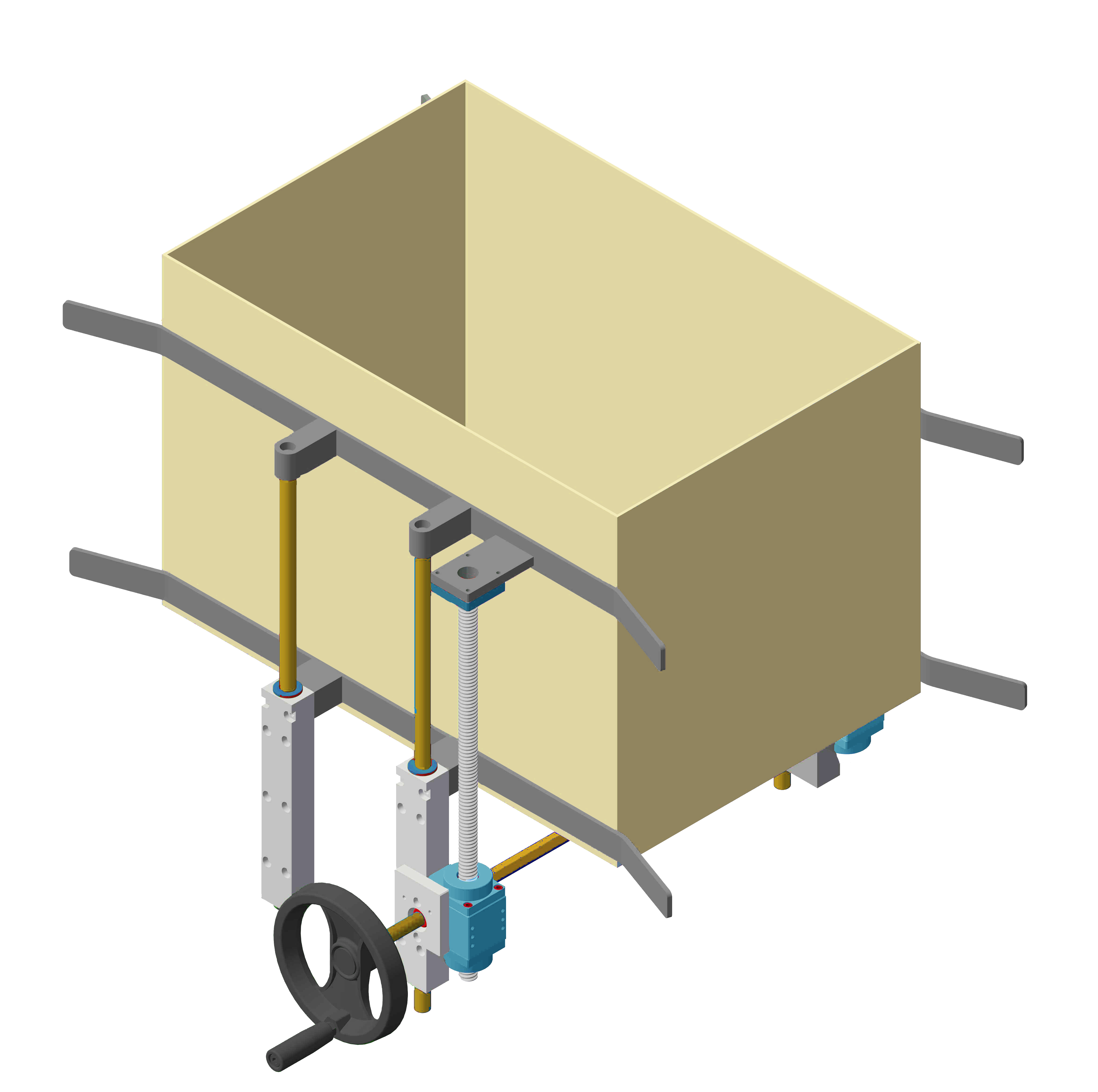
Fotogalerie



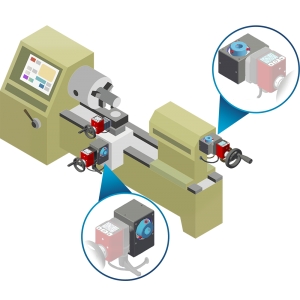
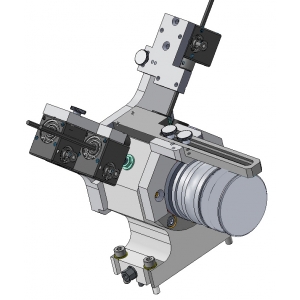
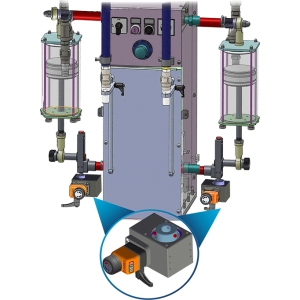
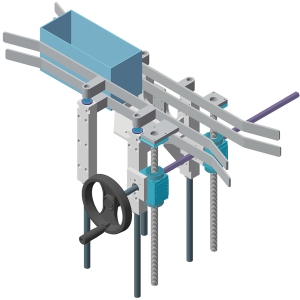



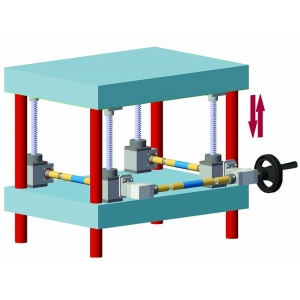






| ANWENDUNGSBEISPIELE |
 .
. 


.png)




|
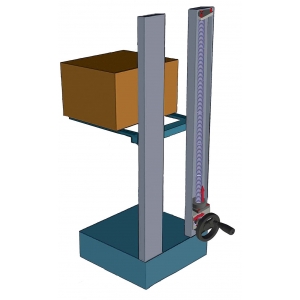
SPINDELHUBGETRIEBE DIMENSIONIERUNGSPRÜFUNG |
|
• Last (kg) = das zu bewegende Gewicht, das auf die Spindel des Spindelhubgetriebes wirkt |
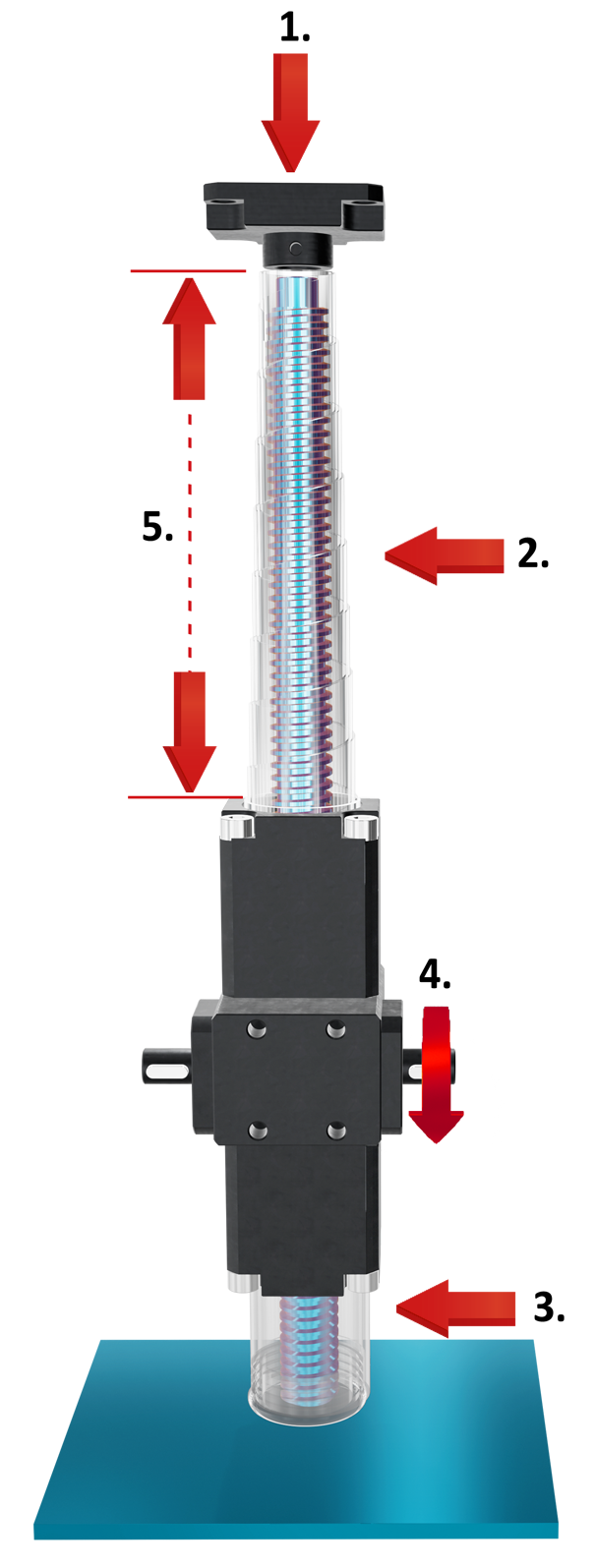 |
| 1. Last (Kg) |
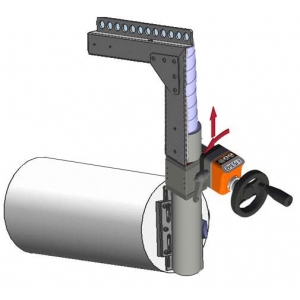
| 2. Obere Schutzspirale (auf Wunsch) |
| 3. Untere Schutzabdeckung (auf Wunsch) |
| 4. Rpm (max. 1500) |
| 5. Hub (mm) |
|
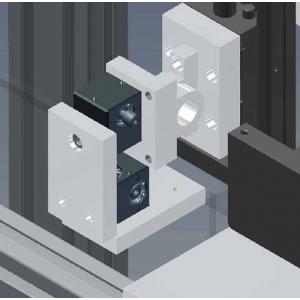
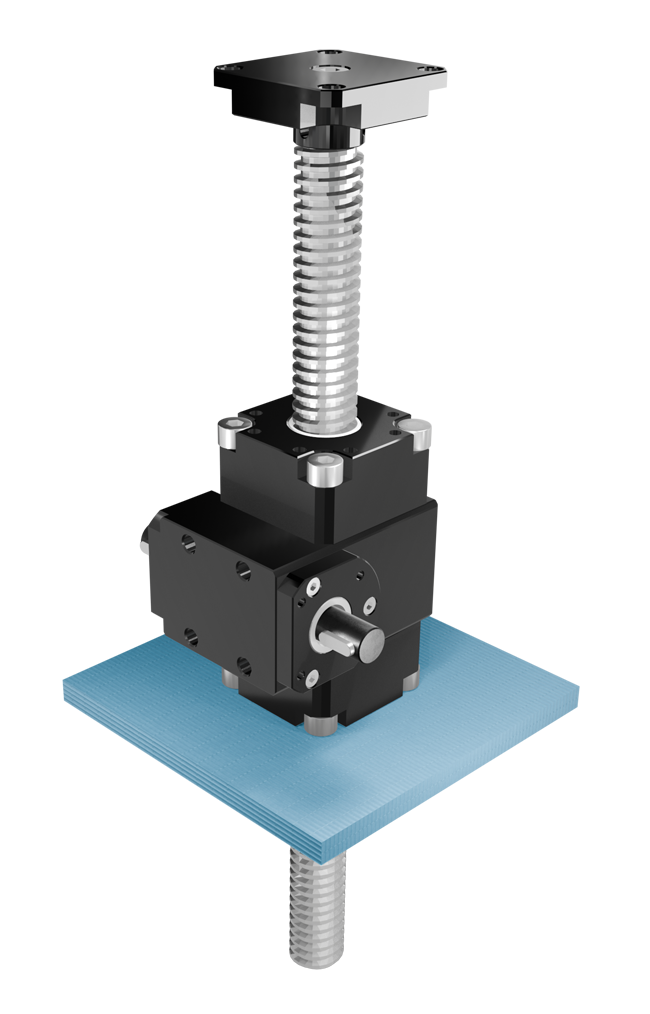
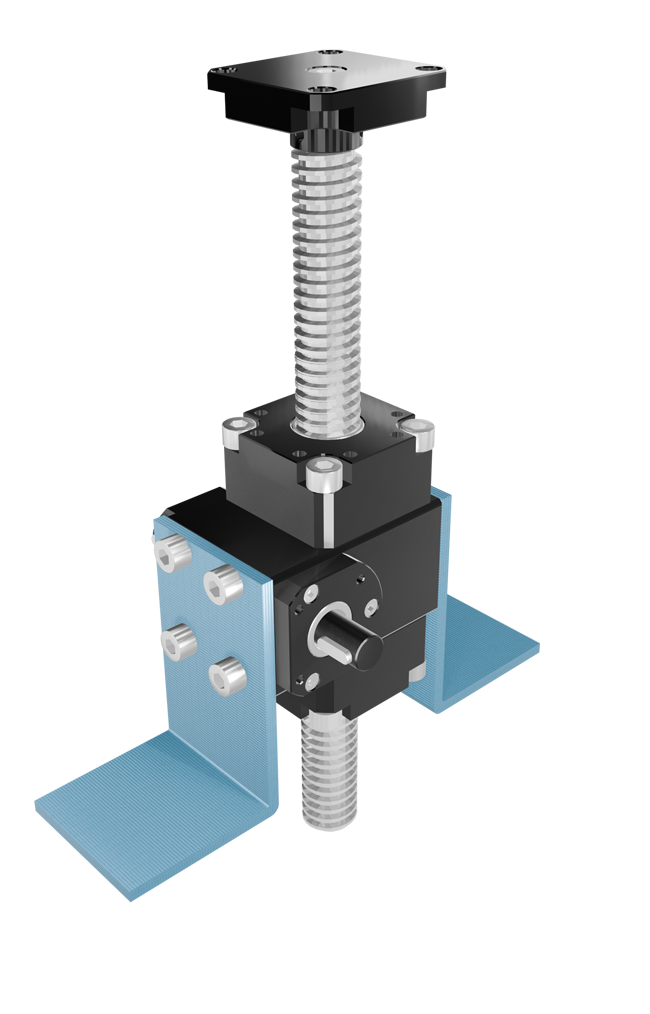
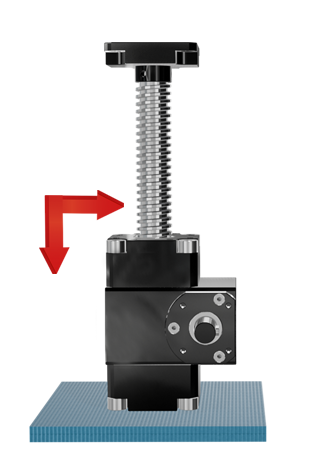
MONTAGE UND BEFESTIGUNG |
|
|
Trapezspindeln benötigen eine geeignete Tragstruktur (nicht mitgeliefert), um eine korrekte Lastbewegung und Systemstabilität zu gewährleisten. Die Einheit muss fest an der Maschinenstruktur befestigt werden, unter Verwendung einer ebenen, starren und genau ausgerichteten Basis. |
|
|
Basierend auf der Anwendungs-Konfiguration: |
|
 |
 |
|
Untenlager: |
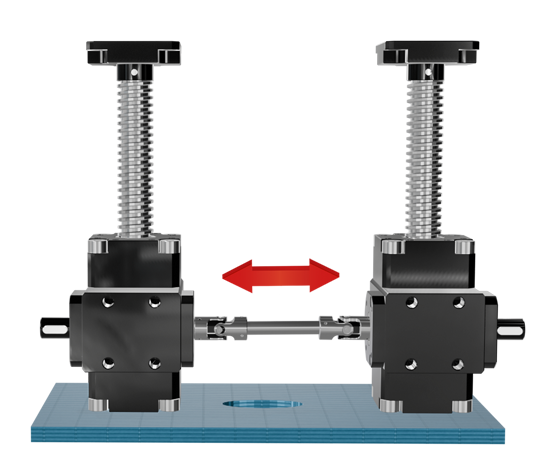
Seitenlager: |
|
Vorteile korrekter Montage: Minimiert den internen Verschleiß und gewährleistet präzisen, langlebigen Betrieb. |
|
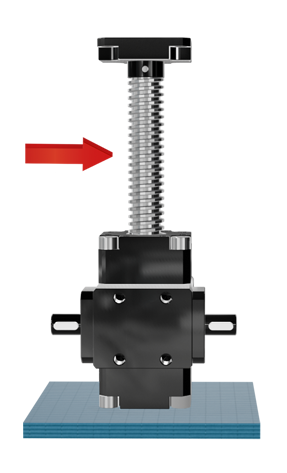
| MONTAGE | |
 |
 |
|
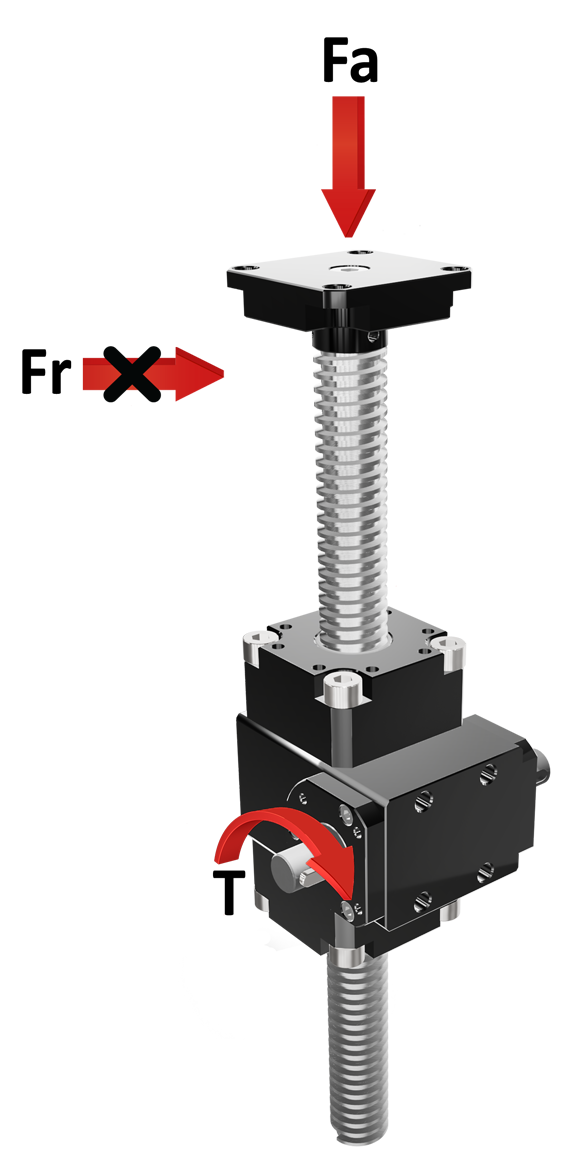
Bei der Montage dürfen keine radialen/seitlichen Kräfte auf die Spindel wirken, da diese die Hauptursache für Ausfälle darstellen. |
Die Ebene, an der das Spindelhubgetriebe befestigt wird, und die Spindel müssen orthogonal zueinander sein, und Last sowie Spindel müssen koaxial ausgerichtet sein, um Exzentrizität zu vermeiden. |
 |
|
|
Beim Einsatz mehrerer Spindelhubgetriebe (auch über Getriebe verbunden) müssen die Anschlüsse exakt ausgerichtet sein, damit die Last gleichmäßig verteilt wird. In diesem Fall empfiehlt sich der Einsatz von Kupplungen zur Ausgleichung von Fehlstellungen. |
|
Richiedi l'accesso
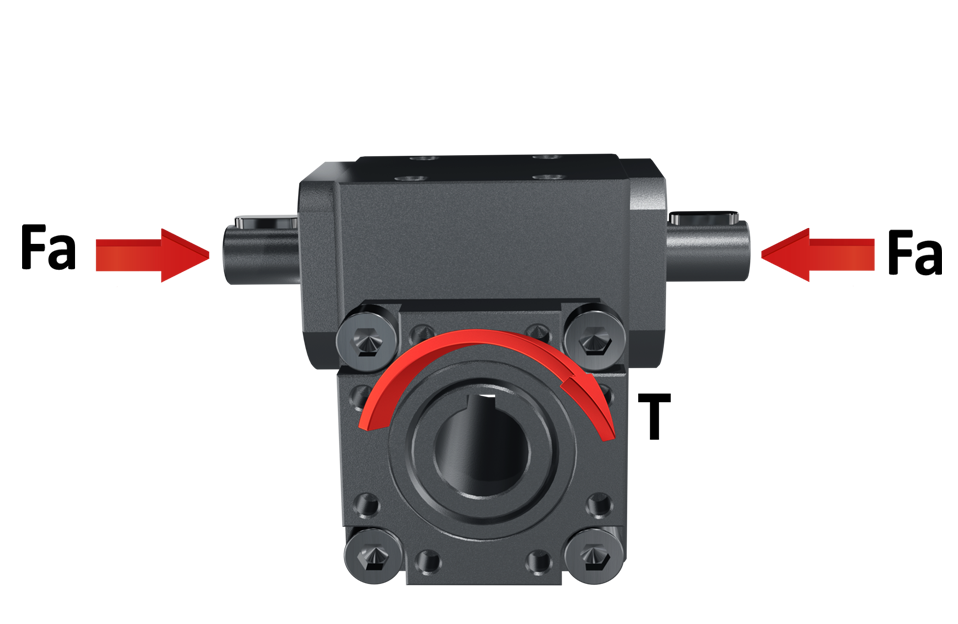
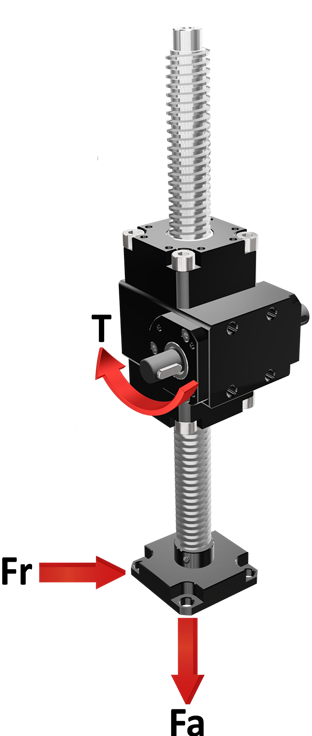
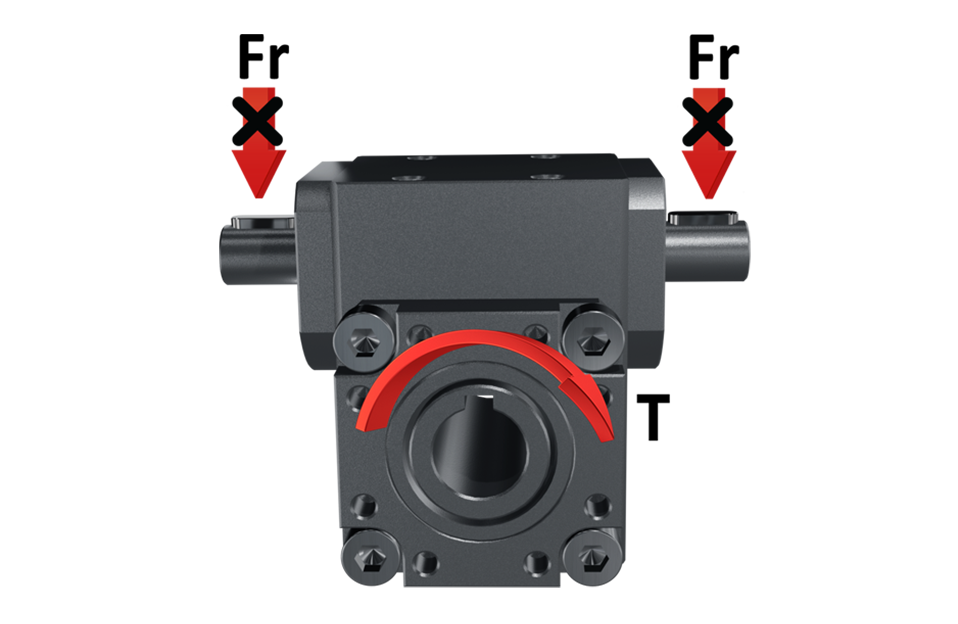
| LASTDARSTELLUNG |
| Die auf Wellen wirkenden Belastungen können in Bezug auf die Wellenachse radial (Fr) oder axial (Fa) sein. Bei Spindelhubgetrieben können die Lasten als Zug- oder Drucklast ausgeführt sein (dies ist bei der Bestellung anzugeben).
Fr = Radialkraft/-last, wirkt senkrecht zur Welle/Achse Hinweis: Die maximal zulässigen Werte für Fr, Fa und T sind Modell- und Betriebsabhängig. |
|
Axialkraft |
Zug |
Druck |
 |
 |
|
| Radialekraft | ||
 |
| KALKULIERUNG VON WINKELGETRIEB LEBENSDAUER | |
| Die Berechnung gilt für alle Modelle des Katalogs |
|
(Nm) ANGENOMMENE DAUER✽ = 10.000H X Fu (Nutzungsfaktor) EMPFOHLENES DREHMOMENT |
✽ Der theoritischen Einschaltdauer von 10.000 Stunden sind folgende Betriebsbedingungen zugrundegelegt:
● anliegendes Drehmoment = empfohlenes Drehmoment (siehe Tabelle)
● max. 8 Stunden pro Tag
● Arbeitstemperatur 20°C
● ohne Stoss-Belastung
● Ta Tatsächlich angewendetes Ausgangsdrehmoment
● Max. angewendetes Drehmoment (siehe Tabellen/Modelle)
| GLOSSAR |
| FR = Radialkraft |
| FA = Axialkraft |
| R = Leistung |
| T = Drehmoment |
| Tm = maximales Drehmoment |
| Tr = empfohlenes Drehmoment |
| Ta = tatsächliches Drehmoment |
| To = Ausgangsdrehmoment |
| Ti = Eingangsdrehmoment |
| Pn = Power |
| N = Newton |
| Nm = Newton Meter |
| fu = Einsatzfaktor |
| i = Übersetzung |
| rpm = Umdrehungen pro Minute (1/min) |
| n1 = Eingangswelle |
| n2 = Ausgangswelle |
| M = Vollwelle |
| F = Hohlwelle |
| F = durchgehende Hohlwelle |
|
⦿ Für die korrekte Dimensionierung sind die folgende Daten nötig: Übertragene Leistung (Pn), Ausgangs-Drehmoment (T) und Eingangs-Drehzahl (rpm). |
|
⦿ Technische Daten zur Auswahl des passenden Winkelgetriebe finden Sie in den Tabellen, oder fragen Sie einfach nach in unseren technischen Abteilungen. |
| ⦿ Die Maßangaben in Tabellen/Datenblätter sind in <mm>, sofern nicht anders angegeben. Alle Übersetzungsverhältnisse sind als <Bruch> angegeben, sofern nicht anders angegeben. Alle Kräfte werden in N, Lasten in kg, Drehmomente in Nm und Wirkungsgrade in %, sofern nicht anders angegeben, angegeben. |




